
SLIDE 1
1
TODO add: PID material from Pont slides Some inverted pendulum videos Model-based control and other more sophisticated
controllers?
More code speed issues – perf with and w/o FP on
different processors
Last Time
Estimating worst case execution time Holistic scheduling: real-time guarantees over a CAN
bus
Today
Feedback (closed loop) control and PID controllers
Principles Implementation Tuning
Control Systems
Definitions:
Desired state variables: X*(t)
- These are given to the system from outside
- E.g. “room temperature should be 70”
Estimated state variables: X’(t)
- E.g. “room temperature is currently 67”
- Estimation uses standard data acquisition techniques
– E.g. thermistor + ADC
Actions: U(t)
- System commands U(t) converted into driving forces
using transducers
- E.g. “turn off the furnace”
More Control Terms
Goal of a control system is to minimize error:
e(t) = | X*(t) – X’(t) |
Evaluating a control system
Steady-state controller error
- Average e(t)
Transient response
- How long the system takes to reach 99% of the desired
final value after X*(t) is changed
Stability
- Does the system reach a steady state (smooth constant
- utput) or does it oscillate?
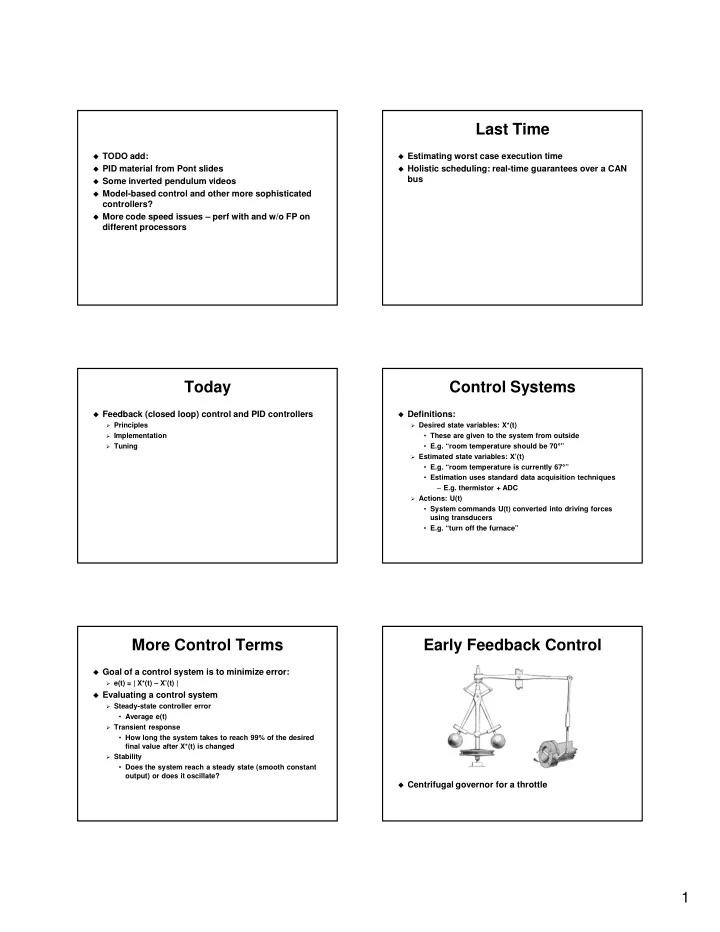
Early Feedback Control
Centrifugal governor for a throttle