
2/13/2012 1
Information Technology Group #2
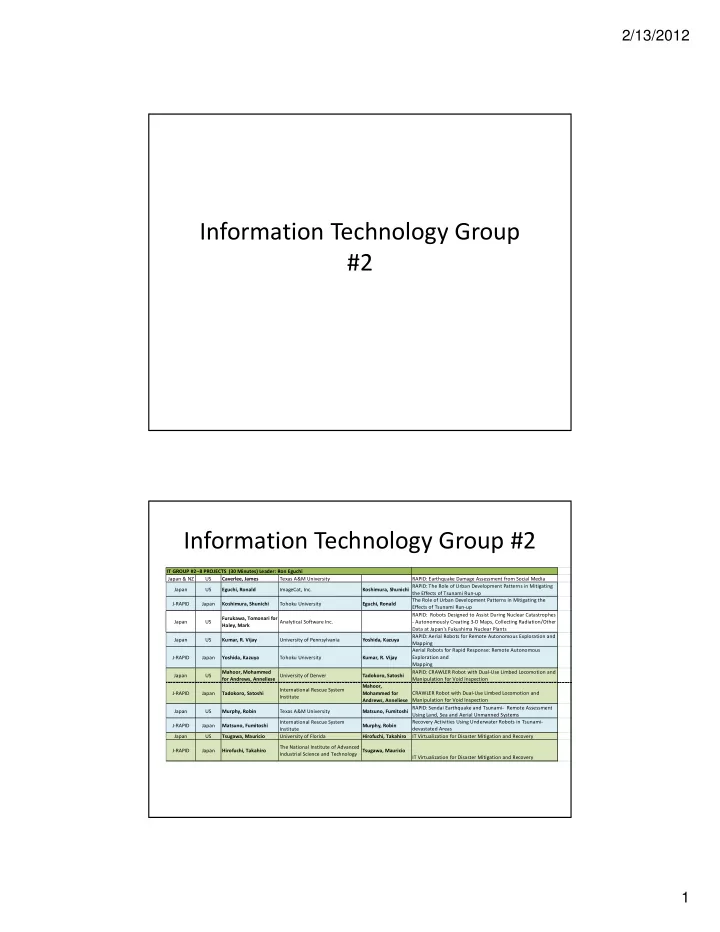
Japan & NZ US Caverlee, James Texas A&M University RAPID: Earthquake Damage Assessment from Social Media Japan US Eguchi, Ronald ImageCat, Inc. Koshimura, Shunichi RAPID: The Role of Urban Development Patterns in Mitigating the Effects of Tsunami Run-up J-RAPID Japan Koshimura, Shunichi Tohoku University Eguchi, Ronald The Role of Urban Development Patterns in Mitigating the Effects of Tsunami Run-up Japan US Furukawa, Tomonari for Haley, Mark Analytical Software Inc. RAPID: Robots Designed to Assist During Nuclear Catastrophes
- Autonomously Creating 3-D Maps, Collecting Radiation/Other
Data at Japan's Fukushima Nuclear Plants Japan US Kumar, R. Vijay University of Pennsylvania Yoshida, Kazuya RAPID: Aerial Robots for Remote Autonomous Exploration and Mapping J-RAPID Japan Yoshida, Kazuya Tohoku University Kumar, R. Vijay Aerial Robots for Rapid Response: Remote Autonomous Exploration and Mapping Japan US Mahoor, Mohammed for Andrews, Anneliese University of Denver Tadokoro, Satoshi RAPID: CRAWLER Robot with Dual-Use Limbed Locomotion and Manipulation for Void Inspection J-RAPID Japan Tadokoro, Satoshi International Rescue System Institute Mahoor, Mohammed for Andrews, Anneliese CRAWLER Robot with Dual-Use Limbed Locomotion and Manipulation for Void Inspection Japan US Murphy, Robin Texas A&M University Matsuno, Fumitoshi RAPID: Sendai Earthquake and Tsunami- Remote Assessment Using Land, Sea and Aerial Unmanned Systems J-RAPID Japan Matsuno, Fumitoshi International Rescue System Institute Murphy, Robin Recovery Activities Using Underwater Robots in Tsunami- devastated Areas Japan US Tsugawa, Mauricio University of Florida Hirofuchi, Takahiro IT Virtualization for Disaster Mitigation and Recovery J-RAPID Japan Hirofuchi, Takahiro The National Institute of Advanced Industrial Science and Technology Tsugawa, Mauricio IT Virtualization for Disaster Mitigation and Recovery IT GROUP #2--8 PROJECTS (30 Minutes) Leader: Ron Eguchi