
SLIDE 1
Image Analysis
Segmentation Christina Olsén colsen@cs.umu.se
Department of Computing Science Umeå University
February 17, 2009
Christina Olsén (CS, UmU) Segmentation February 17, 2009 1 / 46
The topics of this lecture are Thresholding Region based segmentation The Watershed-algorithm
Christina Olsén (CS, UmU) Segmentation February 17, 2009 2 / 46
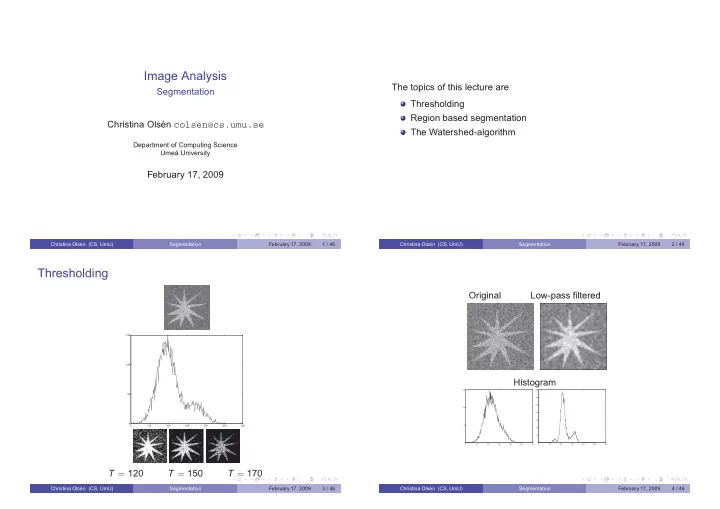
Thresholding
50 100 150 200 250 300 50 100 150
T = 120 T = 150 T = 170
Christina Olsén (CS, UmU) Segmentation February 17, 2009 3 / 46
Original Low-pass filtered Histogram
50 100 150 200 250 300 50 100 150 50 100 150 200 250 300 50 100 150 200 250 300 350
Christina Olsén (CS, UmU) Segmentation February 17, 2009 4 / 46