
SLIDE 1
Image Analysis
Representation and description Christina Olsén colsen@cs.umu.se
Department of Computing Science Umeå University
March 3, 2009
Christina Olsén (CS, UmU) Representation and description March 3, 2009 1 / 35
The topics of this lecture are (chapter 11) Chain codes Polygonal Approximations Skeletons Fourier descriptors Matlab’s regionprops
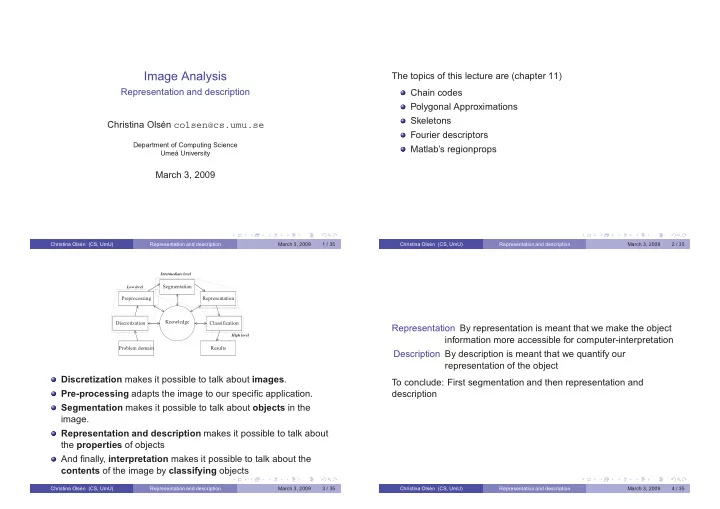
Christina Olsén (CS, UmU) Representation and description March 3, 2009 2 / 35 Classification Representation Segmentation Discretization Problem domain Results Knowledge Preprocessing
Low level Intermediate level High level
Discretization makes it possible to talk about images. Pre-processing adapts the image to our specific application. Segmentation makes it possible to talk about objects in the image. Representation and description makes it possible to talk about the properties of objects And finally, interpretation makes it possible to talk about the contents of the image by classifying objects
Christina Olsén (CS, UmU) Representation and description March 3, 2009 3 / 35
Representation By representation is meant that we make the object information more accessible for computer-interpretation Description By description is meant that we quantify our representation of the object To conclude: First segmentation and then representation and description
Christina Olsén (CS, UmU) Representation and description March 3, 2009 4 / 35