
SLIDE 1
Hoare logic and Model checking If we can express the artefact as a - - PowerPoint PPT Presentation
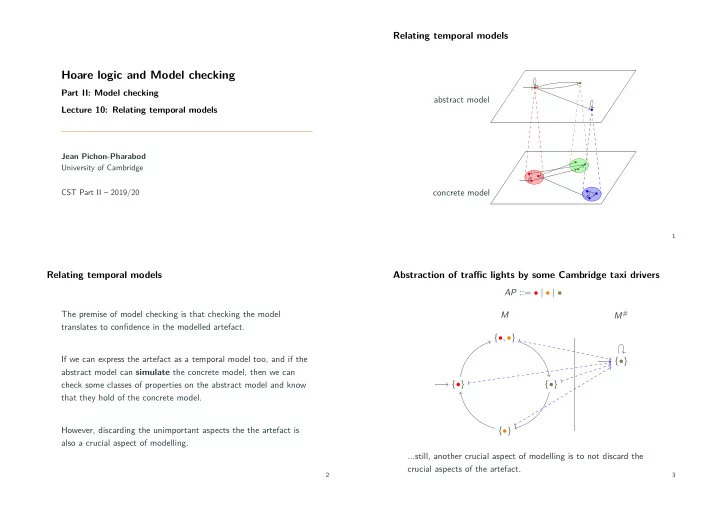
Hoare logic and Model checking If we can express the artefact as a temporal model too, and if the crucial aspects of the artefact. ...still, another crucial aspect of modelling is to not discard the M Abstraction of traffjc lights by some
def
ACTL∗IF.
def
WI.