
SLIDE 1
Discrete-Time Time Invariance
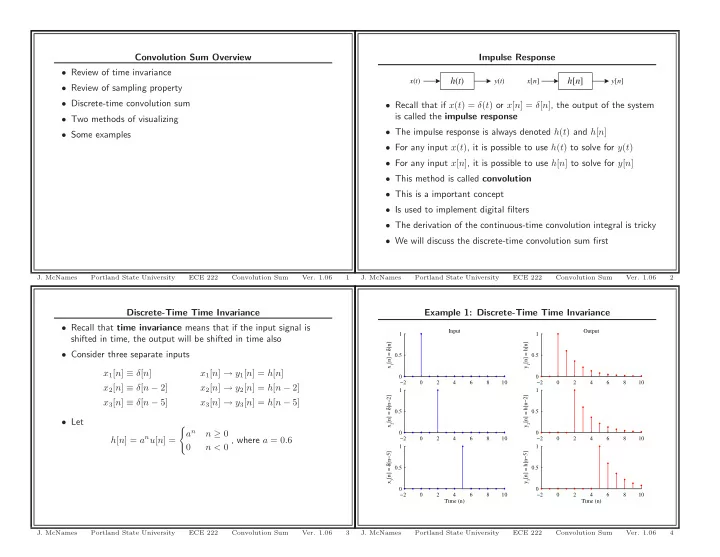
- Recall that time invariance means that if the input signal is
shifted in time, the output will be shifted in time also
- Consider three separate inputs
x1[n] ≡ δ[n] x1[n] → y1[n] = h[n] x2[n] ≡ δ[n − 2] x2[n] → y2[n] = h[n − 2] x3[n] ≡ δ[n − 5] x3[n] → y3[n] = h[n − 5]
- Let
h[n] = anu[n] =
- an
n ≥ 0 n < 0 , where a = 0.6
- J. McNames
Portland State University ECE 222 Convolution Sum
- Ver. 1.06
3
Convolution Sum Overview
- Review of time invariance
- Review of sampling property
- Discrete-time convolution sum
- Two methods of visualizing
- Some examples
- J. McNames
Portland State University ECE 222 Convolution Sum
- Ver. 1.06
1
Example 1: Discrete-Time Time Invariance
−2 2 4 6 8 10 0.5 1 Input x1[n] = δ[n] −2 2 4 6 8 10 0.5 1 Output y1[n] = h[n] −2 2 4 6 8 10 0.5 1 x2[n] = δ[n−2] −2 2 4 6 8 10 0.5 1 y2[n] = h[n−2] −2 2 4 6 8 10 0.5 1 Time (n) x3[n] = δ[n−5] −2 2 4 6 8 10 0.5 1 Time (n) y3[n] = h[n−5]
- J. McNames
Portland State University ECE 222 Convolution Sum
- Ver. 1.06
4
Impulse Response h(t)
x(t) y(t)
h[n]
x[n] y[n]
- Recall that if x(t) = δ(t) or x[n] = δ[n], the output of the system
is called the impulse response
- The impulse response is always denoted h(t) and h[n]
- For any input x(t), it is possible to use h(t) to solve for y(t)
- For any input x[n], it is possible to use h[n] to solve for y[n]
- This method is called convolution
- This is a important concept
- Is used to implement digital filters
- The derivation of the continuous-time convolution integral is tricky
- We will discuss the discrete-time convolution sum first
- J. McNames
Portland State University ECE 222 Convolution Sum
- Ver. 1.06