
SLIDE 1
General feedback system
Relevant relations/transfer functions
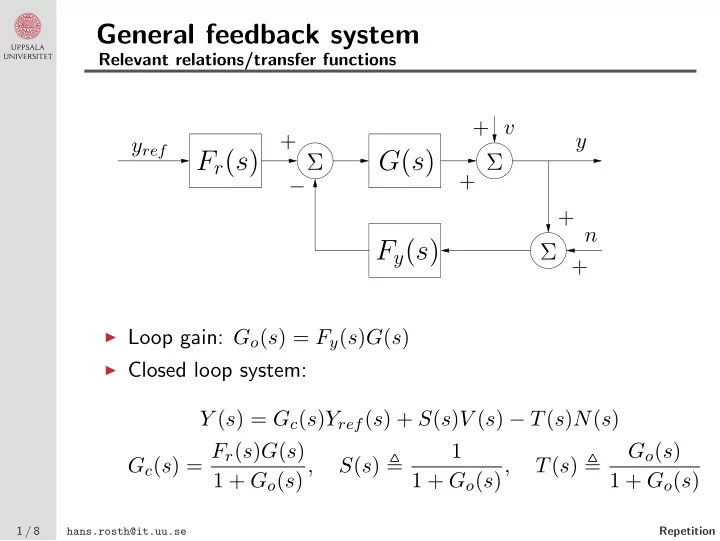
yref y v n + + + + + −
G(s) Fy(s) Fr(s)
Σ Σ Σ
◮ Loop gain: Go(s) = Fy(s)G(s) ◮ Closed loop system:
Y (s) = Gc(s)Yref(s) + S(s)V (s) − T(s)N(s) Gc(s) = Fr(s)G(s) 1 + Go(s) , S(s) 1 1 + Go(s), T(s) Go(s) 1 + Go(s)
1 / 8 hans.rosth@it.uu.se Repetition