
SLIDE 1
From Images to Voxels From Images to Voxels Steve Seitz Steve - - PDF document
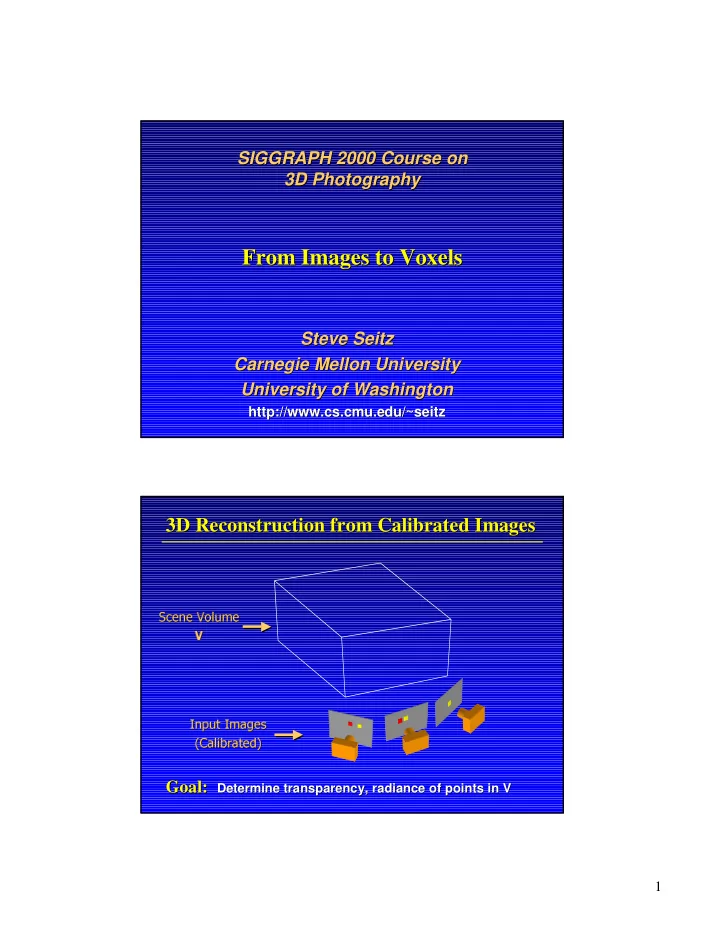
SIGGRAPH 2000 Course on SIGGRAPH 2000 Course on 3D Photography 3D Photography From Images to Voxels From Images to Voxels Steve Seitz Steve Seitz Carnegie Mellon University Carnegie Mellon University University of Washington University of
3 3
3), for M images, N
3 voxels
N3 3 possible scenes!
. .YR[HOVFRORUHG YR[HOVFRORUHG 0YR[HOVWHVWHG YR[HOVWHVWHG PLQ PLQWRFRPSXWH WRFRPSXWH RQD0+]6*, RQD0+]6*,
. .YR[HOVFRORUHG YR[HOVFRORUHG 0YR[HOVWHVWHG YR[HOVWHVWHG PLQ PLQWRFRPSXWH WRFRPSXWH RQD0+]6*, RQD0+]6*,
WUXHVFHQH WUXHVFHQH
YR[HOV YR[HOV
WUXHVFHQH WUXHVFHQH
YR[HOV YR[HOV
WUXHVFHQH WUXHVFHQH
ZLWKQHZLQSXWYLHZ ZLWKQHZLQSXWYLHZ
Martin & Aggarwal Aggarwal, “Volumetric description of objects from multiple views”, , “Volumetric description of objects from multiple views”,
158.
Szeliski, “Rapid , “Rapid Octree Octree Construction from Image Sequences”, Computer Vision, Construction from Image Sequences”, Computer Vision, Graphics, and Image Processing: Image Understanding, 58(1), 1993 Graphics, and Image Processing: Image Understanding, 58(1), 1993, pp. 23 , pp. 23-
32.
Seitz & Dyer, “Photorealistic Scene Reconstruction by Voxel Coloring”, Proc. ring”, Proc. Computer Vision and Pattern Recognition (CVPR), 1997, pp. 1067 Computer Vision and Pattern Recognition (CVPR), 1997, pp. 1067-
1073.
Seitz & Kutulakos, “Plenoptic Image Editing”, Proc. Int. Conf. on Computer
Vision (ICCV), 1998, pp. 17 Vision (ICCV), 1998, pp. 17-
24.
Kutulakos & Seitz, “A Theory of Shape by Space Carving”, Proc. ICCV, 1998, pp. ICCV, 1998, pp. 307 307-
314.
Faugeras & Keriven Keriven, “ , “Variational Variational principles, surface evolution, principles, surface evolution, PDE's PDE's, level set , level set methods and the stereo problem", IEEE Trans. on Image Processing methods and the stereo problem", IEEE Trans. on Image Processing, 7(3), 1998, , 7(3), 1998,
344.
Szeliski & & Golland Golland, “Stereo Matching with Transparency and Matting”, Proc. Int. , “Stereo Matching with Transparency and Matting”, Proc. Int.
524.
Roy & Cox, “A Maximum-
Flow Formulation of the N-
camera Stereo Correspondence Problem”, Proc. ICCV, 1998, pp. 492 Correspondence Problem”, Proc. ICCV, 1998, pp. 492-
499.
Fua & Leclerc Leclerc, “Object , “Object-
centered surface reconstruction: Combining multi-
image stereo and shading", Int. Journal of Computer Vision, 16, 1995, stereo and shading", Int. Journal of Computer Vision, 16, 1995, pp. 35
56.
Narayanan, Rander Rander, & , & Kanade Kanade, “Constructing Virtual Worlds Using Dense , “Constructing Virtual Worlds Using Dense Stereo”, Proc. ICCV, 1998, pp. 3 Stereo”, Proc. ICCV, 1998, pp. 3-
10.