
SLIDE 1
1
1
2D Systems
- Images are outputs of 2D systems
- Continuous vs. sampled (discrete) images
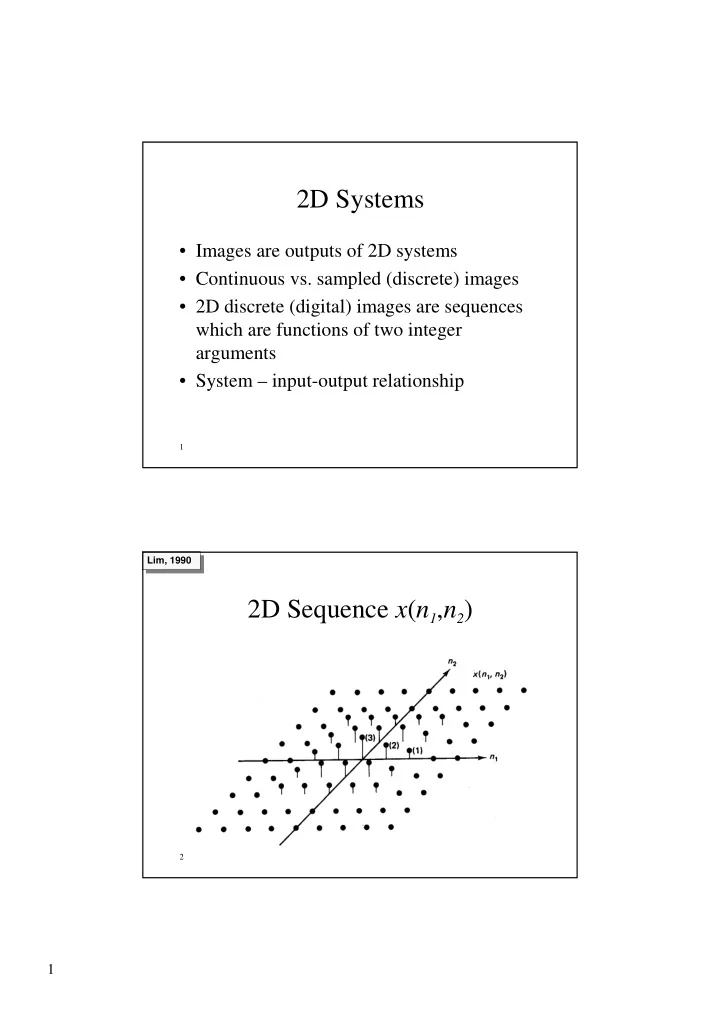
- 2D discrete (digital) images are sequences
which are functions of two integer arguments
- System – input-output relationship
2
2D Sequence x(n1,n2)
Lim, 1990