
SLIDE 1
θ θ
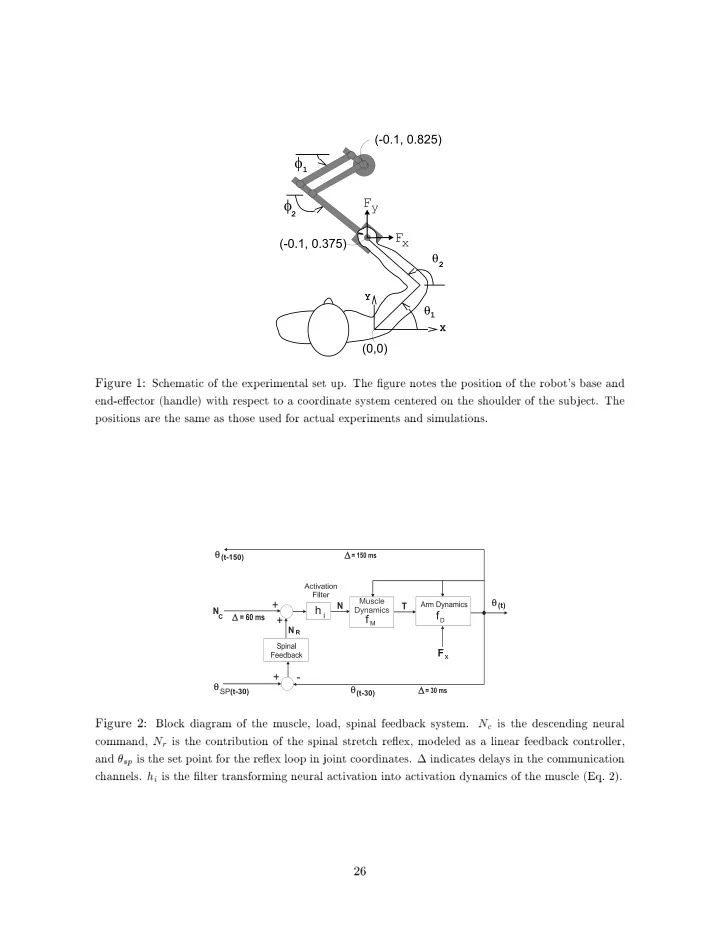
Figure 1: Sc hematic- f
- sition
- f
- t's
- rdinate
- n
- f
- sitions
- f
- f
- sp
- in
- p
- rdinates.
- indicates
- f