
SLIDE 1
18TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS
- 1. Introduction
Shape memory polymers (SMPs) are a group of adaptive polymers that can recover the permanent shape from a temporary shape by external stimuli on
- demand. Among a variety of external stimuli for
polymer actuation, temperature is the commonly
- used. However, due to slow heating rates, recovery
- f this type of SMP is usually slow. Recently, efforts
have been made to improve the recovery rate of SMPs by using novel heating methods. For example, the SM effect is realized through converting electrical energy to heat through magnetic field induced inductive heating of magnetic particles dispersed in an SMP. This approach offers the advantages of fast and remote heating. In this paper, we investigate the considerations in designing mageno-sensitive particle reinforced SMPs using finite element simulations enhanced by a newly developed thermomechanical finite deformation constitutive model. In particular, we study the influence of particle size, particle volume fraction, heating temperature to the recovery rate of SMP.
- 2. Model Description
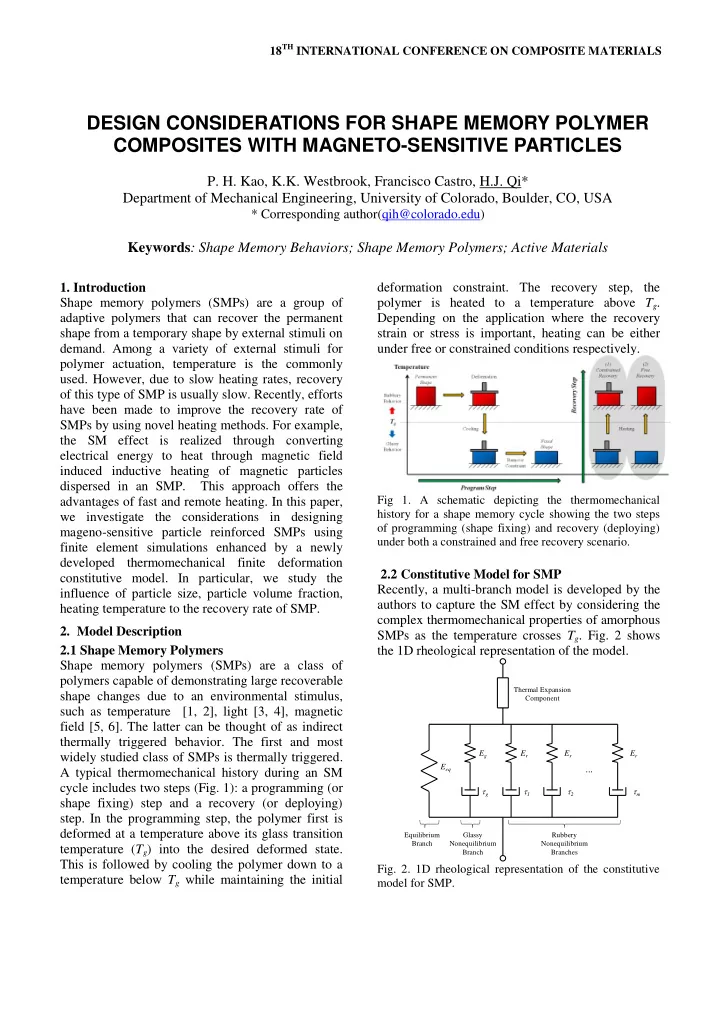
2.1 Shape Memory Polymers Shape memory polymers (SMPs) are a class of polymers capable of demonstrating large recoverable shape changes due to an environmental stimulus, such as temperature [1, 2], light [3, 4], magnetic field [5, 6]. The latter can be thought of as indirect thermally triggered behavior. The first and most widely studied class of SMPs is thermally triggered. A typical thermomechanical history during an SM cycle includes two steps (Fig. 1): a programming (or shape fixing) step and a recovery (or deploying)
- step. In the programming step, the polymer first is
deformed at a temperature above its glass transition temperature (Tg) into the desired deformed state. This is followed by cooling the polymer down to a temperature below Tg while maintaining the initial deformation constraint. The recovery step, the polymer is heated to a temperature above Tg. Depending on the application where the recovery strain or stress is important, heating can be either under free or constrained conditions respectively.
Fig 1. A schematic depicting the thermomechanical history for a shape memory cycle showing the two steps
- f programming (shape fixing) and recovery (deploying)
under both a constrained and free recovery scenario.
2.2 Constitutive Model for SMP Recently, a multi-branch model is developed by the authors to capture the SM effect by considering the complex thermomechanical properties of amorphous SMPs as the temperature crosses Tg. Fig. 2 shows the 1D rheological representation of the model.
Eeq
Rubbery Nonequilibrium Branches
Eg Er Er tg t1 t2
...
Er tm
Glassy Nonequilibrium Branch Equilibrium Branch Thermal Expansion Component
- Fig. 2. 1D rheological representation of the constitutive
model for SMP.
DESIGN CONSIDERATIONS FOR SHAPE MEMORY POLYMER COMPOSITES WITH MAGNETO-SENSITIVE PARTICLES
- P. H. Kao, K.K. Westbrook, Francisco Castro, H.J. Qi*