
SLIDE 1
1.
Impulse Response Models for LTI Systems
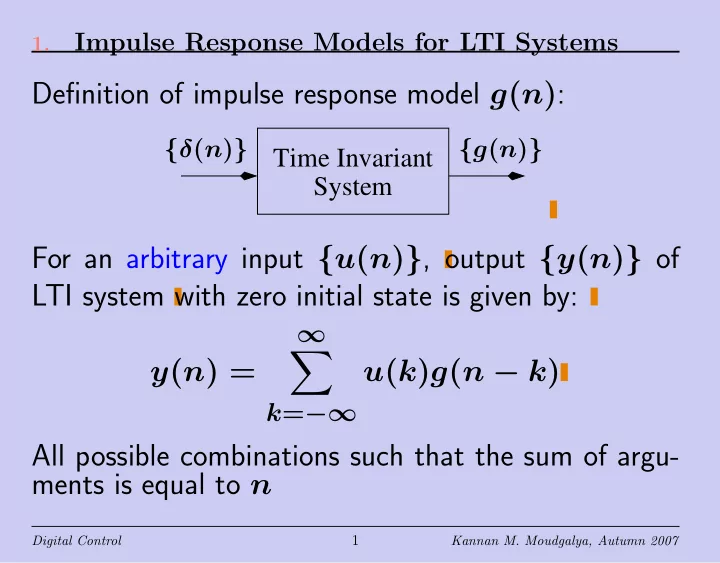
Definition of impulse response model g(n):
Time Invariant System
{g(n)} {δ(n)}
For an arbitrary input {u(n)}, output {y(n)} of LTI system with zero initial state is given by: y(n) =
∞
- k=−∞
u(k)g(n − k) All possible combinations such that the sum of argu- ments is equal to n
Digital Control
1
Kannan M. Moudgalya, Autumn 2007