
SLIDE 1
1
Giorgio Buttazzo
g.buttazzo@sssup.it
Scuola Superiore Sant’Anna
2
Context
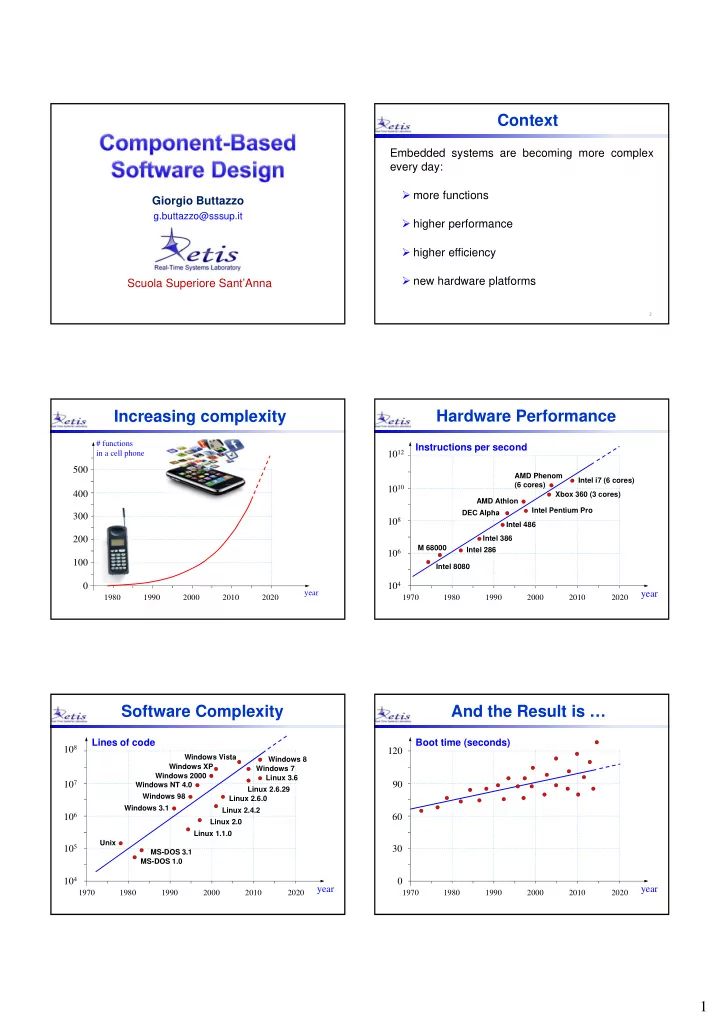
Embedded systems are becoming more complex every day:
- more functions
- higher performance
- higher efficiency
- new hardware platforms
Increasing complexity
1990 2000 2010
100 200
# functions in a cell phone 1980 year 2020
300 400 500
Hardware Performance
1990 2000 2010 1980
year
2020
104 106 108 1010 1012
1970
Instructions per second
Intel 8080 M 68000 Intel 286 Intel 386 Intel 486 Intel Pentium Pro DEC Alpha AMD Athlon Xbox 360 (3 cores) Intel i7 (6 cores) AMD Phenom (6 cores)
Software Complexity
year 104 105 106 107 108 Lines of code
1990 2000 2010 1980 2020 1970
MS-DOS 1.0 Windows 3.1 Windows 2000 Windows XP Windows 7 Windows Vista Unix Windows NT 4.0 Linux 3.6 Linux 2.6.0 Linux 2.4.2 Linux 2.6.29 Windows 98 MS-DOS 3.1 Linux 1.1.0 Linux 2.0 Windows 8