
SLIDE 1
Computer Simulation and Applications
9 September 2008 today’s menu: extremely simple models
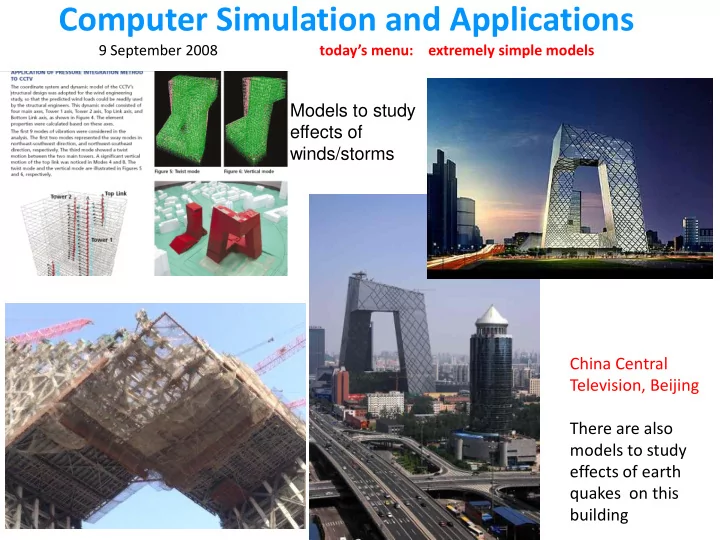
China Central Television, Beijing There are also models to study effects of earth quakes on this building Models to study effects of winds/storms