
SLIDE 1
CHAPTER 7: THE FEEDBACK LOOP Disturbance Response
5 10 15 20 25 30 35 40 45 50
- 0.2
0.2 0.4 0.6 0.8 Time 5 10 15 20 25 30 35 40 45 50
- 1.5
- 1
- 0.5
Time
CHAPTER 7: THE FEEDBACK LOOP Disturbance Response = IAE = - - PowerPoint PPT Presentation
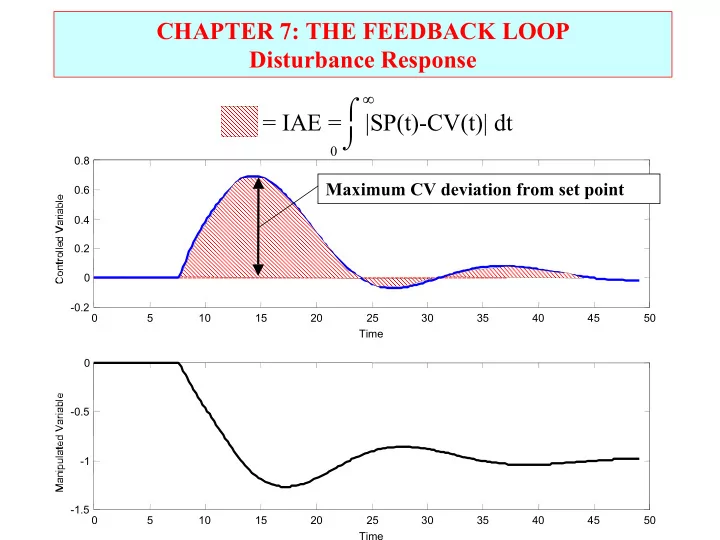
CHAPTER 7: THE FEEDBACK LOOP Disturbance Response = IAE = |SP(t)-CV(t)| dt 0 0.8 Maximum CV deviation from set point 0.6 0.4 0.2 0 -0.2 0 5 10 15 20 25 30 35 40 45 50 Time 0 -0.5 -1 -1.5 0 5 10 15 20 25
5 10 15 20 25 30 35 40 45 50
0.2 0.4 0.6 0.8 Time 5 10 15 20 25 30 35 40 45 50
Time
100 200 300 400 500 600 700 800 900 1000
10 20 Time Controlled Variable 100 200 300 400 500 600 700 800 900 1000
10 20 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 17.5417) Time Controlled Variable 20 40 60 80 100 120
0.5 1 1.5 2 Time Manipulated Variable
20 40 60 80 100 120
1 2 3 S-LOOP plots deviation variables (IAE = 43.9891) Time Controlled Variable 20 40 60 80 100 120
1 2 3 4 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 34.2753) Time Controlled Variable 20 40 60 80 100 120
0.5 1 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 24.0376) Time Controlled Variable 20 40 60 80 100 120
0.5 1 1.5 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 17.5417) Time Controlled Variable 20 40 60 80 100 120
0.5 1 1.5 2 Time Manipulated Variable
20 40 60 80 100 120
1 2 3 S-LOOP plots deviation variables (IAE = 43.9891) Time Controlled Variable 20 40 60 80 100 120
1 2 3 4 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 34.2753) Time Controlled Variable 20 40 60 80 100 120
0.5 1 Time Manipulated Variable
20 40 60 80 100 120
0.5 1 1.5 S-LOOP plots deviation variables (IAE = 24.0376) Time Controlled Variable 20 40 60 80 100 120
0.5 1 1.5 Time Manipulated Variable
FT 1 FT 2 PT 1 PI 1 AT 1 TI 1 TI 2 TI 3 TI 4 PI 2 PI 3 PI 4 TI 5 TI 6 TI 7 TI 8 TI 9 FI 3 TI 10 TI 11 PI 5 PI 6
Gd(s) GP(s) Gv(s) GC(s) GS(s) D(s) CV(s) CVm(s) SP(s) E(s) MV(s) + + +
S c v p c v p
S c v p d
PROCESS Proportional Integral Derivative + +
SP E MV Note: Error = E ≡ SP - CV
PROCESS Proportional Integral Derivative + +
SP E MV Note: Error = E ≡ SP - CV
PROCESS Proportional Integral Derivative + +
SP E MV Note: Error = E ≡ SP - CV
PROCESS Proportional Integral Derivative + +
SP E MV Note: Error = E ≡ SP - CV