
SLIDE 1
2/14/2012 1
Car-Like Robot: How to Park a Car?
(Nonholonomic Planning)
1
Types of Path Constraints
Local constraints:
e.g., lie in free space
Differential constraints:
ff e.g., have bounded curvature
Global constraints:
e.g., have minimal length
2
Types of Path Constraints
Local constraints:
e.g., lie in free space
Differential constraints:
ff e.g., have bounded curvature
Global constraints:
e.g., have minimal length
3
Car-Like Robot
L
θ
Configuration space is 3-dimensional: q = (x, y, θ)
4
y x
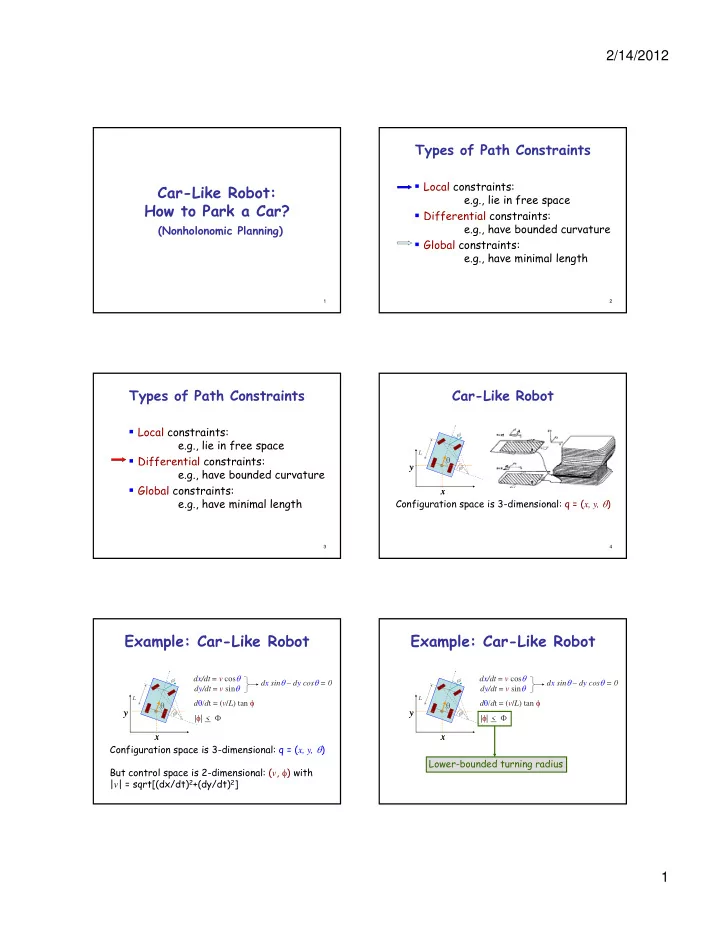
Example: Car-Like Robot
L
θ dx/dt = v cosθ dy/dt = v sinθ dθ/dt = (v/L) tan φ dx sinθ – dy cosθ = 0
y x Configuration space is 3-dimensional: q = (x, y, θ) But control space is 2-dimensional: (v, φ) with |v| = sqrt[(dx/dt)2+(dy/dt)2]
| |φ| < Φ
Example: Car-Like Robot
dx/dt = v cosθ dy/dt = v sinθ dθ/dt = (v/L) tan φ dx sinθ – dy cosθ = 0
L