
Announcements
- Homework
k 3: Game Trees s (lead TA: Zhaoqing)
- Due Tue 1 Oct at 11:59pm (deadline extended)
- Homework
k 4: MDPs s (lead TA: Iris)
- Due Mon 7 Oct at 11:59pm
- Pr
Project 2 t 2: Mu Multi-Ag Agent Search (lead TA: Zhaoqing)
- Due Thu 10 Oct at 11:59pm
- Offi
Office H Hours
- Iris:
s: Mon 10.00am-noon, RI 237
- JW
JW: Tue 1.40pm-2.40pm, DG 111
- Zh
Zhaoqi qing: : Thu 9.00am-11.00am, HS 202
- El
Eli: Fri 10.00am-noon, RY 207
CS 4100: Artificial Intelligence
Markov Decision Processes
Jan-Willem van de Meent Northeastern University
[These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.]
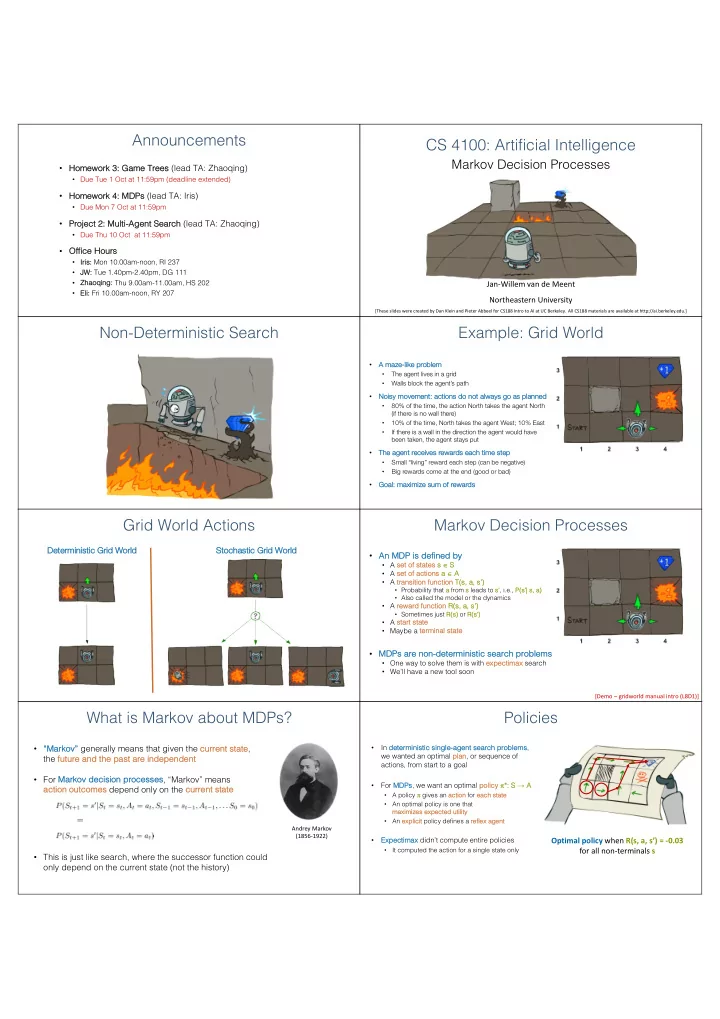
Non-Deterministic Search Example: Grid World
- A
A maze-like ke problem
- The agent lives in a grid
- Walls block the agent’s path
- No
Nois isy movement: act actions s do
- not
- t al
always ays go as as plan anned ed
- 80% of the time, the action North takes the agent North
(if there is no wall there)
- 10% of the time, North takes the agent West; 10% East
- If there is a wall in the direction the agent would have
been taken, the agent stays put
- The
The age gent nt receives s rewards s each h time st step
- Small “living” reward each step (can be negative)
- Big rewards come at the end (good or bad)
- Go
Goal: l: maxim imiz ize sum of rewa wards
Grid World Actions
De Determ rmin inis istic ic Grid rid World rld St Stochastic Grid World
Markov Decision Processes
- An MDP is
s defined by
- A se
set of st states s s Î S
- A se
set of actions s a a Î A
- A transi
sition function T(s, s, a, s’) ’)
- Probability that a
a from s leads to s’ s’, i.e., P(s P(s’| s, s, a)
- Also called the model or the dynamics
- A re
reward rd function R(s, s, a, s’) ’)
- Sometimes just R(s)
s) or R( R(s’) ’)
- A st
start st state
- Maybe a terminal st
state
- MDPs
s are non-determinist stic se search problems
- One way to solve them is with exp
xpectimax search
- We’ll have a new tool soon
[Demo – gridworld manual intro (L8D1)]
What is Markov about MDPs?
- “Marko
kov” v” generally means that given the current st state, the future and the past st are independent
- For Marko
kov v decisi sion processe sses, “Markov” means action outcomes s depend only on the current st state
- This is just like search, where the successor function could
- nly depend on the current state (not the history)
Andrey Markov (1856-1922)
Policies
- In determinist
stic si single-agent se search problems, we wanted an optimal pl plan, or sequence of actions, from start to a goal
- For MD
MDPs, we want an optimal policy y p*: *: S → A
- A policy p gives an acti
action
- n for each st
state
- An optimal policy is one that
maxi ximize zes s exp xpected utility y
- An exp
xplicit policy defines a reflex x agent
- Exp
xpectimax didn’t compute entire policies
- It computed the action for a single state only