
SLIDE 1
1
1
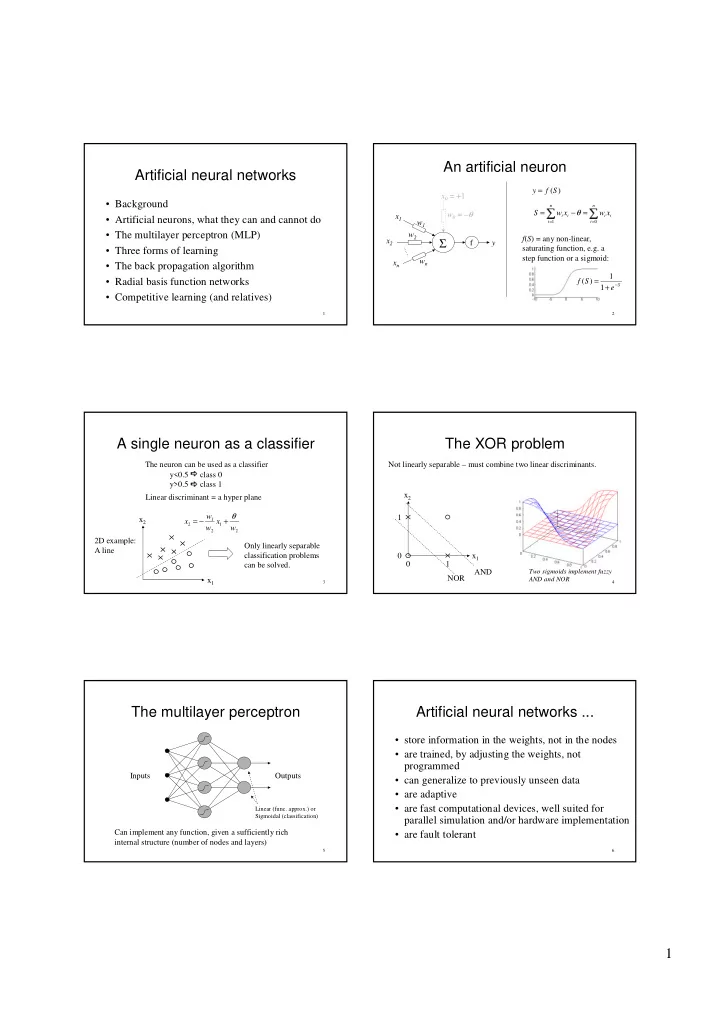
Artificialneuralnetworks
- Background
- Artificialneurons,whattheycanandcannotdo
- Themultilayerperceptron(MLP)
- Threeformsoflearning
- Thebackpropagationalgorithm
- Radialbasisfunctionnetworks
- Competitivelearning(andrelatives)
2
Anartificialneuron
) (S f y =
✁= =
= − =
n i n i i i i i
x w x w S
1
θ f(S)=any non-linear, saturatingfunction,e.g.a stepfunctionorasigmoid: x0 =+1
Σ
f x1 x2 xn w0 =–θ w1 w2 wn y
S
e S f
−
+ = 1 1 ) (
3
Asingleneuronasaclassifier
2 1 2 1 2
w x w w x θ + − = x1 x2 Theneuroncanbeusedasaclassifier y<0.5
✂class0 y>0.5
✂class1 Onlylinearlyseparable classificationproblems canbesolved. Lineardiscriminant=ahyper plane 2Dexample: Aline
4
TheXORproblem
Notlinearlyseparable– mustcombinetwolineardiscriminants. x1 x2 1 1 NOR AND
Twosigmoidsimplementfuzzy ANDandNOR
5
Themultilayerperceptron
Inputs Outputs Canimplementanyfunction,givenasufficientlyrich internalstructure(numberofnodesandlayers)
Linear(func.approx.)or Sigmoidal(classification)
6
Artificialneuralnetworks...
- storeinformationintheweights,notinthenodes
- aretrained,byadjustingtheweights,not
programmed
- cangeneralizetopreviouslyunseendata
- areadaptive
- arefastcomputationaldevices,wellsuitedfor
parallelsimulationand/orhardwareimplementation
- arefaulttolerant