
SLIDE 1
Department of Chemical Engineering I.I.T. Bombay, India
A A 1 c 1 2 1 If ; ; K ; K 1 2 1 2 c c - - PowerPoint PPT Presentation
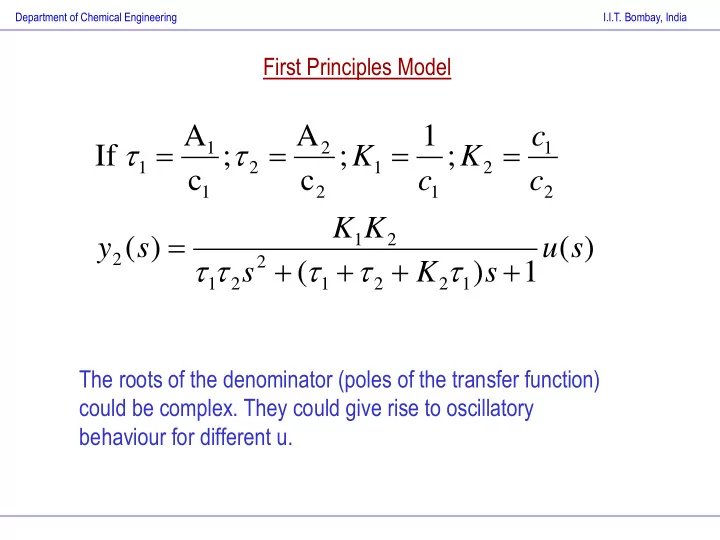
Department of Chemical Engineering I.I.T. Bombay, India First Principles Model A A 1 c 1 2 1 If ; ; K ; K 1 2 1 2 c c c c 1 2 1 2 K K 1 2 y ( s ) u ( s )
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
t d I d c
t d I d c
d I c c
2 2 1
Department of Chemical Engineering I.I.T. Bombay, India
2 2 2
Department of Chemical Engineering I.I.T. Bombay, India
2 2
3 2 g L g L R 6
2
Department of Chemical Engineering I.I.T. Bombay, India
2 1 / 2 / 1
2 1
t t
2 1 / /
2 1
t t
Department of Chemical Engineering I.I.T. Bombay, India
/
t
2 /
t
Department of Chemical Engineering I.I.T. Bombay, India
t
2 2 2 /
2 2 /
t
Department of Chemical Engineering I.I.T. Bombay, India
1 2
r
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
2
Department of Chemical Engineering I.I.T. Bombay, India
Department of Chemical Engineering I.I.T. Bombay, India
2 2
Department of Chemical Engineering I.I.T. Bombay, India
2 2 /
t
2
Department of Chemical Engineering I.I.T. Bombay, India
2 2
2 2 2 2
t
2 2 1