
SLIDE 1
1.
s to Z-Domain Transfer Function
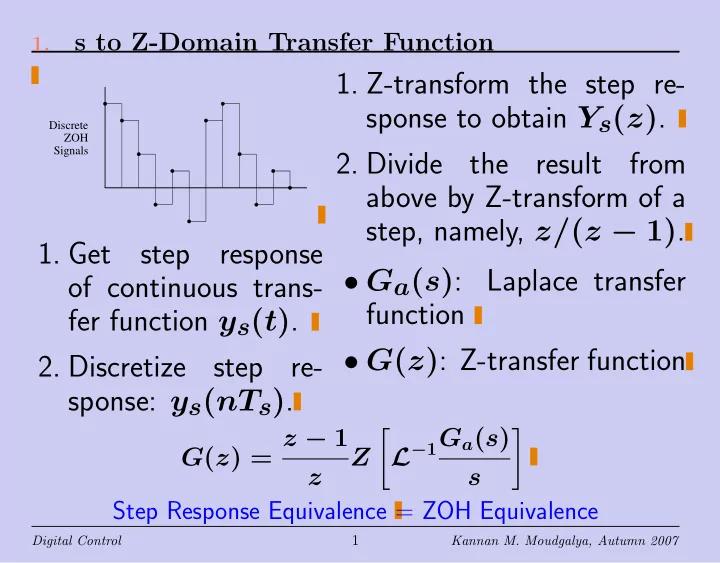
Discrete ZOH Signals
- 1. Get
step response
- f continuous trans-
fer function ys(t).
- 2. Discretize
step re- sponse: ys(nTs).
- 1. Z-transform the step re-
sponse to obtain Ys(z).
- 2. Divide
the result from above by Z-transform of a step, namely, z/(z − 1).
- Ga(s): Laplace transfer
function
- G(z): Z-transfer function
G(z) = z − 1 z Z
- L−1Ga(s)
s
- Step Response Equivalence = ZOH Equivalence
Digital Control
1
Kannan M. Moudgalya, Autumn 2007