
SLIDE 1
7/20/2014
1
- III. Intelligent Augmentation
CMU Summer School 7.2014 Blake Hannaford, University of Washington CMU Summer School 7.2014
Blake Hannaford, University of Washington
BioRobotics Lab
CMU Summer School 7.2014 Blake Hannaford, University of Washington
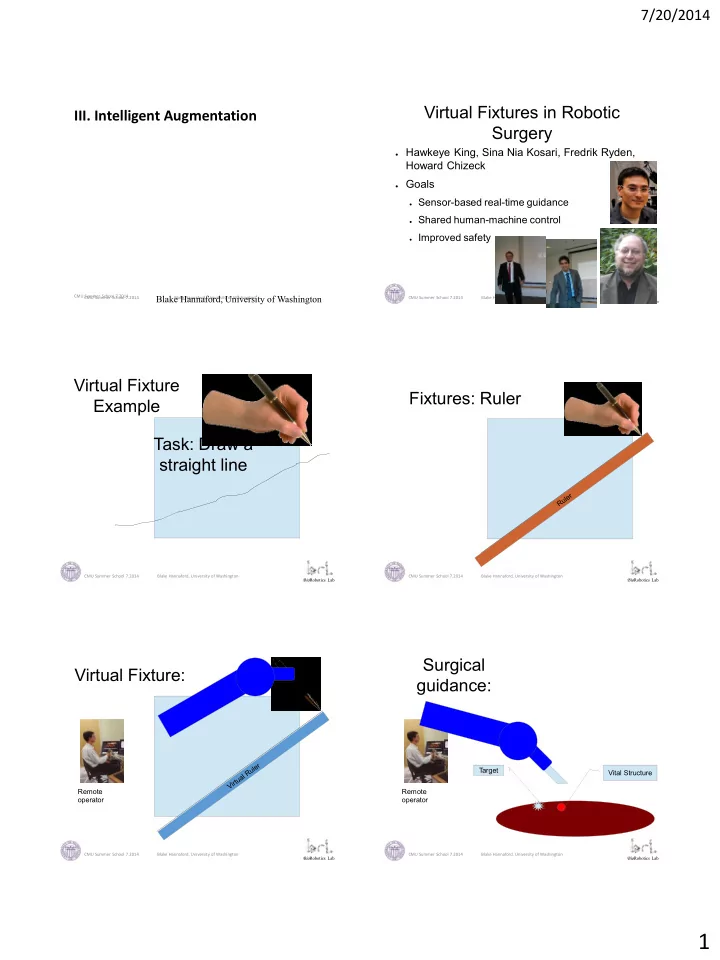
Virtual Fixtures in Robotic Surgery
- Hawkeye King, Sina Nia Kosari, Fredrik Ryden,
Howard Chizeck
- Goals
- Sensor-based real-time guidance
- Shared human-machine control
- Improved safety
BioRobotics Lab
CMU Summer School 7.2014 Blake Hannaford, University of Washington
Task: Draw a straight line Virtual Fixture Example
BioRobotics Lab
CMU Summer School 7.2014 Blake Hannaford, University of Washington
Fixtures: Ruler
BioRobotics Lab
CMU Summer School 7.2014 Blake Hannaford, University of Washington
Virtual Fixture:
Remote
- perator
BioRobotics Lab
CMU Summer School 7.2014 Blake Hannaford, University of Washington
Surgical guidance:
Remote
- perator
Target Vital Structure