
SLIDE 1
0 ( q ) and deduce 0 Strengthening vs. Incremental Proof - - PowerPoint PPT Presentation
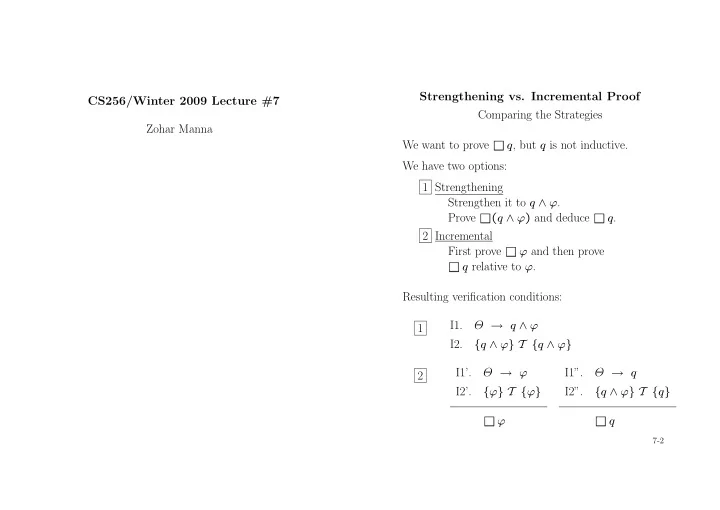
0 0 ( q ) and deduce 0 Strengthening vs. Incremental Proof CS256/Winter 2009 Lecture #7 0 Comparing the Strategies Zohar Manna 0 We want to prove q , but q is not inductive. We have two options: 1 Strengthening Strengthen it to q