SLIDE 26 Project Overview Feedback basics, dynamic systems Schedule Plan Manpower Plan Cost Estimates and Spreadsheet Breakout
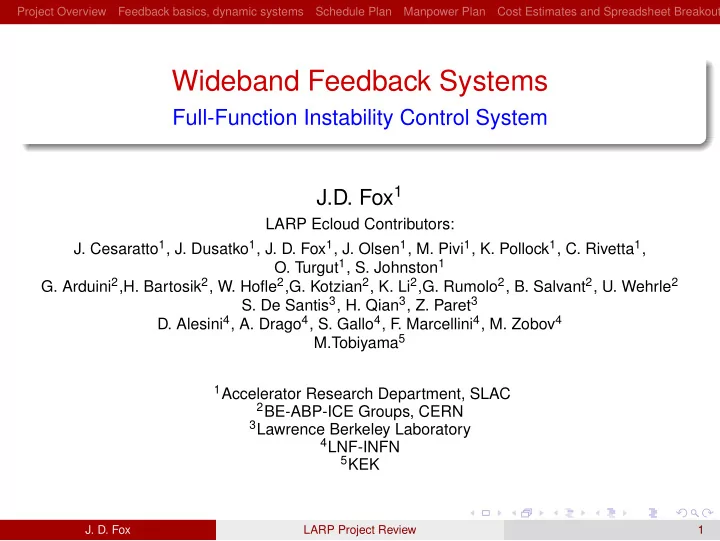
!"# !"# !"$ !"% &'#$()*"+ &'#% &'#, &'#- &'#. &'#/ &'#0 &'#1 &'$2 &'$# &'$$ 34567(894( :4;5<;=>;?@ :4;5<;=>;?@(A 34567(<;?7B(:4;5<;=>;?@ CD"(+E?6765<4; $B/2A
0B%$A ##B$,A #,B$,A #/B%$A $2B,1A $%B/,A $/B20A %2B-#A !6F4G(+E?6765<4; 2B02A $B0$A
0B2$A #2B/$A #%B,1A #.B%%A #1B$,A $$B#.A $-B$/A !"#"$%&'"()*"+&,(-.%(/01/!"'%(-)2,).%(/&2%3"--.(4/-5-)"'/ '6- 7899:999 79 7;<:=>; 7;?:8@9 789@:AB; 78?8:@>@ "@;?HG4;<I65<4;(JK;?5<4;(J4G(>;>G=@(G6LM N$-O222 N2 N$.O%.0 N$.O%.0 %%A N%,O1%/ P>?<>Q>G(?H6;;>7(R>Q>74ML>;5O(MG4545@M> N$-O222 N2 N$.O%.0 N$.O%.0 %%A N%,O1%/ S<=H(F6;R8<R5H(T<?T>G(M48>G(6LM7<J<>GEOEM7<55>GE9?4LF<;>GE N-2O222 N2 N2 N-,O#.2 N-,O#.2 %%A N/#O/.$ U<R>F6;R(E7457<;>(T<?T>G(MG4545@M> N.$O-22 N.,O#00 N.-O1#1 N#%2O#2. %%A N#/%O2,# $,C%2 7B=;:999 7BA<:A99 78:99<:?B; 78:BA;:<B; 78:BA;:<B; "56JJ("?<>;5<E5O($(&3+ N.22O222 N.2,O022 N.#.O1$2 N#O$$#O/$2 2A N#O$$#O/$2 "56JJ(+;=<;>>GO(#(&3+ N$02O222 N$0$O$,2 N$0/O01. N-/2O#%. 2A N-/2O#%. &>77489V4E5R4?O(#(&3+ N#02O222 N#0#O,,2 N#0-O2/. N%..O-#. 2A N%..O-#. WG6RK65>("5KR>;5O($(&3+(X(-2A(?4E5(EM7<5(8<5H("!*:Y N1-O222 N1-O/.2 N1/O./1 N#1%O,%1 2A N#1%O,%1 !"-.4(/-)D!."-/%E/ED$$FED(3).%(/&2%)%)5&":/-.'D$,).%(-:/'!G/HIJK/8/LMNOK/!PQ0 '6- 78=;:999 789A:><9 7A>:?>9 78B8:=;9 7<;?:9@B S<=H(M48>G(6LM7<J<>GE(J4G("V"(CZ(>Q67K65<4; N/-O222 N0#O$,2 N2 N0#O$,2 %%A N#2/O.,% P&(?4LM4;>;5EO(?4;5G47(>[K<ML>;5(J4G(T<?T>G(6;R(M48>G(6LM7<J<>GE N$-O222 N$/O202 N2 N$/O202 %%A N%-O00# S<=H(?6M6?<5@(MG4?>EE<;=(?H6;;>7(R>Q>74ML>;5O($;R(&VW*(M765J4GL(J4G(R>Q>74ML>;5 N/-O222 N2 N0%O,%2 N0%O,%2 %%A N##2O-,- $,C%2 78:8<9:999 78:8A9:>@A 78:<9B:A<? 7<:>B9:8B< 7<:A@A:<>9 "56JJ("?<>;5<E5O($B$-(&3+ N./-O222 N/##O%0% N/$1O#%- N#O,,2O-#0 $2A N#O/$0O.$# "56JJ(+;=<;>>GO(#B$-(&3+ N%-2O222 N%.0O0.- N%/0O2/2 N/,.O1%- $2A N01.O%$$ &>77489V4E5R4?O(#B-(&3+ N$/2O222 N$0,O--% N$1#O.-, N-/.O$2/ $2A N.1#O,,0 WG6RK65>("5KR>;5O($(&3+ N1-O222 N#22O#$# N#2$O.#1 N$2$O/,2 $2A N$,%O$0/ !"-.4(/RNS/E,C2.3,).%(/%E/,/ED$$FED(3).%(/!"$.#"2,C$"/HIJK/3%()2%$/.()"2E,3" '6-/TO0GJ/UPV/GWGJPQ:/LRGPS/0N/0NP/GWGJPQX 7=89:999 7>B8:<=< 7;8B:8?8 7B89:?8> 78:>@;:@<9 &G4;5(>;R(H@FG<R(6;R(F>6L(L45<4;(G>?><Q>G N-2O222 N-/O#$2 N2 N-/O#$2
N0-O.02 \GF<5]4JJE>5(6;R(R@;6L<?(G6;=>(MG>E>GQ65<4;(MG4?>EE4G N%2O222 N%,O$/$ N2 N%,O$/$
N-#O,20 &G4;5(>;R(Q6G<6F7>(R>76@(6;R(5<L<;=(67<=;L>;5 N$2O222 N2 N$%O,., N$%O,.,
N%-O#1. 3<L<;=(6;R(E@;?HG4;<I65<4;(E@E5>L(J4G(<;5>GJ6?>(54(6??>7>G654G N$2O222 N##O,$, N##O/%$ N$%O#-.
N%,O/%, &VW*(E<=;67(MG4?>EE<;=(?H6;;>7(X74=<?(MG4?>EE<;=(JK;?5<4;EY N#22O222 N2 N##/O%$2 N##/O%$2
N#/-O102 &G4;5(>;R(*9Z(E@E5>L(J4G(,(W"9E(G65> N$2O222 N2 N$%O,., N$%O,.,
N%-O#1. )6?T(>;R(Z9*(E@E5>L(J4G(,(W"9E(4M>G65<4; N$2O222 N2 N$%O,., N$%O,.,
N%-O#1. )6?T(>;R(748(7>Q>7(R<E5G<FK5<4;O(F6;R(EM7<5O(J6;4K5(6;R(5<L<;=(R<E5GKFK5<4;(?H6EE<E N,2O222 N2 N,.O1$0 N,.O1$0
N/2O%1$ )6?T(>;R(M48>G(6LM7<J<>GEO(,(748(F6;RO(#22(U(>6?H N#22O222 N2 N##/O%$2 N##/O%$2
N#/-O102 )6?T(>;R(M48>G(6LM7<J<>GEO(,(H<=H(F6;RO(#22(U(>6?H N#.2O222 N#0$O/0, N2 N#0$O/0,
N$/,O#/. S<=H(M48>G(?4KM7>GEO(L4;<54G<;=O(6;R(R<6=;4E5<?(LK^(EKFE@E5>L N,2O222 N2 N,.O1$0 N,.O1$0
N/2O%1$ _E>G(<;5>GJ6?>(MG4?>EE4G(6;R(J<GL86G>(J4G(4M>G654G N%-O222 N#1O11$ N$2O-%# N,2O-$%
N.2O/0- :G<5<?67(EM6G>(?4LM4;>;5E(J4G(4M>G65<4; N/-O222 N0-O.02 N0/O112 N#/%O./2
N$.2O-2- %&).%(,$/.)"'-/TO0GJ/UPV/GWGJPQ:/LRGPS/0N/0NP/GWGJPQX 7;=9:999 7>8?:8@9 7>?@:9B? 7@@9:<;? 7BB9:>A8 3K;;>7(?6F7>EO(H<=H(6;R(748(M48>G N$-O222 N2 N$1O%%2 N$1O%%2
N,%O11- 3K;;>7(G6?TEO(?447<;=O(6;R(M48>G(R<E5G<FK5<4;O(L4;<54G<;= N$2O222 N2 N$%O,., N$%O,.,
N%-O#1. V<?TKM(E5GK?5KG>(X<;?7KR<;=(J>>R5HG4K=HE(6;R(Q6?KKL(E5GK?5KG>Y N/-O222 N0-O.02 N2 N0-O.02
N#$0O-$2 !48(F6;R(T<?T>G(6EE>LF7<>E(X<;?7KR<;=(J>>R5HG4K=HE(]($(>6?H(6;R(Q6?KKL(E5GK?5KG>Y N$22O222 N$$0O,02 N2 N$$0O,02
N%,$O/$2 S<=H(F6;R(T<?T>G(6EE>LF7<>E(X<;?7KR<;=(J>>R5HG4K=HE(]($(>6?H(6;R(Q6?KKL(E5GK?5KG>Y N$-2O222 N2 N$1%O%22 N$1%O%22
N,%1O1-2 $,C%2 78:<;;:999 78:>AB:;>@ 78:?<?:>99 7A=A:<B< 7>:@B<:8<= 7;:8@A:B=A "56JJ("?<>;5<E5O($(&3+ N.22O222 N..,O%$2 N.02O1,2 N-$%O,0- N#O0.0O/,- ,2A N$O.#.O$,% "!*:("56JJ(+;=<;>>GO($(&3+ N-.2O222 N.$2O2%$ N.%-O-,, N$,,O$1% N#O,11O0.1 ,2A N$O211O0#/ :+P`("56JJ(+;=<;>>G N$02O222 N%#2O2#. N%#/O//$ N#.$O0.$ N/12O.-2 ,2A N#O#2.O1#2 &>77489V4E5R4?O(#B-(&3+ N$/2O222 N$10O1,, N%2.O,$% N$21O%1, N0#,O/.# ,2A N#O#,2O..- WG6RK65>("5KR>;5O($(&3+ N1-O222 N#2-O#0, N#2/O0#. N##2O-#, N%$%O-#% ,2A N,-$O1#0 )2,#"$/TCW/WPRV/HIJK/PGORYRJI0N/TYRL0V/VRJPX/RNS/0ZPVKPRSX 7?<:;99 7@;:>@; 7@@:<<? 7@=:>8@ 7@A:?>? 7=>:@=? 7=?:B<8 7=@:8BB 7?B<:8>8 7?B<:8>8 )0JRY/T10V/8/SPYIZPVPS/1MYYF1MNOJI0N/GWGJPQX:/N0/3"2(/O0NJVILMJI0N N#O$1%O/1% N#O%/$O,,0 N#O.1,O/#/ N#O.-%O%,$ N$O///O.2$ N$O100O.-2 N#O%$.O/,. N#%O#2/O$1/ 78@:;=8:A=B )0JRY/T10V/8/SPYIZPVPS/GWGJPQ/J0/JKP/-&-X:/H*3"2(/O0NJVILMJI0N N#O2,0O#.- N#O#$#O,-, N#O,#2O#., N#O%.#O.00 N#O0-,O,0$ N$O2#0O%.# N1-,O,12 N1O/.0O02% 78<:<=;:B;A $,C%2/2,)"-[/(Xa;?7KR<;=(F>;>J<5E(6;R(-%A(<;R<G>?5Y (%)"-[ "56JJ("?<>;5<E5 N%22O222 !<;>E(H<=H7<=H5>R(<;(M>6?H(?4GG>EM4;R(54(M45>;5<67(:+P`(?4;5G<FK5<4; "56JJ(+;=<;>>G N$02O222 !<;>E(H<=H7<=H5>R(<;(=G>>;(?4GG>EM4;R(54(!*PV(?4;5G<FK5<4; V4E5R4? N#02O222 !<;>E(H<=H7<=H5>R(89M655>G;(?4GG>EM4;R(54(?4E5(EM7<5(4G(M45>;5<67(:+P`(?4;5G<FK5<4; WG6RK65>("5KR>;5(X-2A(!*PVO(-2A("!*:(*PZ(EKMM4G5Y N1-O222 :4;5<;=>;?@(?656=4G<>E(7<E5>R(<;(MG4M4E67(R4?KL>;5O(A(H>G>(6G>(6Q>G6=>R(4Q>G(6EE<=;>R(7<;>(56ETE 3G6Q>7(?4E5E(>E?6765>R(8<5H(76F4G(G65>B((UH65(<E(5G6Q>7(>E?6765<4;(G65>b CD"(4Q>GH>6R(G65>(/B.-A(M>G(:47>(:6G5>G /B.-A :+P`(?4E5E(>E5<L65>R(KE<;=(5@M<?67(_"(!6F(?4E5EB 3G6Q>7(4Q>GH>6R(G65>(65(5H>(WD*(76F4G(G65>(4J(-%A
34567O(:+P`(?4;5G<FK5<4;(6EEKL>E(:+P`(MG4Q<R>E(J4G(5H>(\V3a\`*!(a3+C"(X>B=BO(Q6?KKL(T<?T>GEO(M<?TKMEO(?6F7<;=O(>5?BY :+P`(&>77489V4E5R4?(X+B=BO(cB(!<Y(84GTE(4;(L<^(4J(E<LK765<4;(6;R(H6GR86G>(R>Q>74ML>;5 WG6RK65>(E5KR>;5E(-2A(!*PVO(-2A(*PZ("!*:(EKMM4G5 !6F(5>E5(>[K<ML>;5(6;R(76F(EKMM4G5(?4E5E(;>>R(W*PZ(?4;5G<FK5<4;(](3)Z 34567("!*:(?4;5G<FK5<4;(XJ4G(=G6RK65>(E5KR>;5(EKMM4G5(4Q>G(MG4=G6L(7<J>5<L>Yd 78:==B:<AB ED$$/ED(3).%(/!"$.#"2,C$"/F/\.4\/C,(!].!)\/.()2,FCD(3\/.(-),C.$.)5/E""!C,3^/-5-)"'-/EMYY/1MNOJI0N/SPYIZPVRLYP/RZRIYRLYP/10V/JPGJ/ R1JPV/$-< P>Q<E<4;(e#B%(fB(:>E6G6554O(fB(&4^O(:B(P<Q>556(O(F6E>R(4;(#(JK77(JK;?5<4;(R>7<Q>G6F7>(6;R(gEKMM7<>Rg("!*:(76F4G(G65>E P>Q<E<4;(Z65>d(2.92.9$2#$ )G<>J("?4M>(Z>E?G<M5<4;(6;R(*EEKLM5<4;EB
LARP Project Review 26