
SLIDE 1
Chenyang Lu 1
TinyOS
Chenyang Lu 2
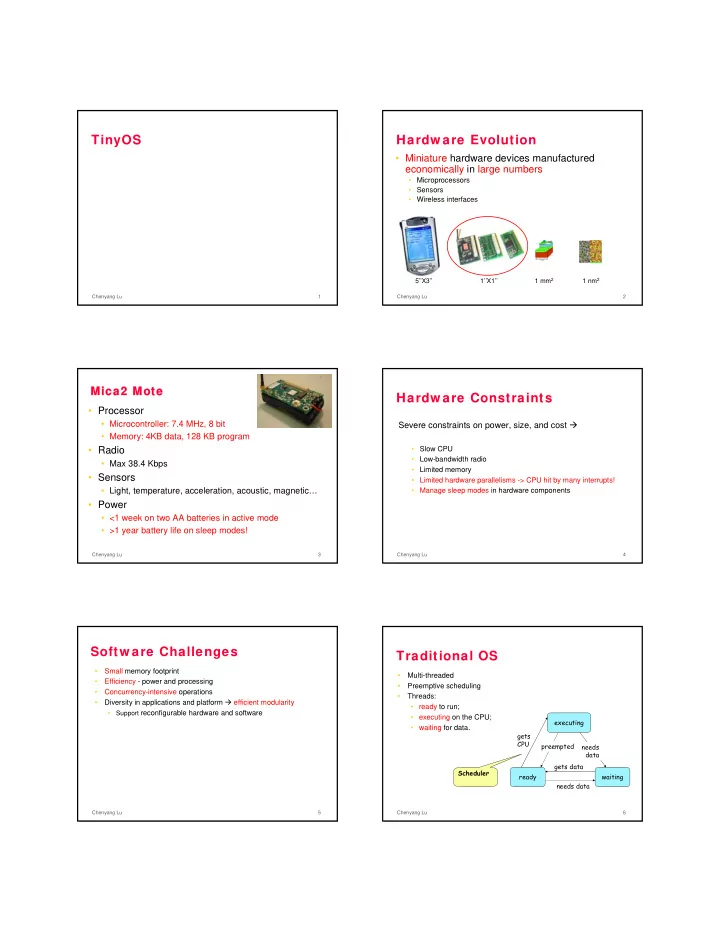
Hardw are Evolution
- Miniature hardware devices manufactured
economically in large numbers
- Microprocessors
- Sensors
- Wireless interfaces
5’’X3’’ 1’’X1’’ 1 mm2 1 nm2
Chenyang Lu 3
Mi Mica2 M ca2 Mote te
- Processor
- Microcontroller: 7.4 MHz, 8 bit
- Memory: 4KB data, 128 KB program
- Radio
- Max 38.4 Kbps
- Sensors
- Light, temperature, acceleration, acoustic, magnetic…
- Power
- <1 week on two AA batteries in active mode
- >1 year battery life on sleep modes!
Chenyang Lu 4
Hardw are Constraints
Severe constraints on power, size, and cost
- Slow CPU
- Low-bandwidth radio
- Limited memory
- Limited hardware parallelisms -> CPU hit by many interrupts!
- Manage sleep modes in hardware components
Chenyang Lu 5
Softw are Challenges
- Small memory footprint
- Efficiency - power and processing
- Concurrency-intensive operations
- Diversity in applications and platform efficient modularity
- Support reconfigurable hardware and software
Chenyang Lu 6
Traditional OS
- Multi-threaded
- Preemptive scheduling
- Threads:
- ready to run;
- executing on the CPU;
- waiting for data.
executing ready waiting needs data gets data needs data preempted gets CPU Scheduler