
SLIDE 1
Deformation-Drive Shape Correspondence
Hao (Richard) Zhang1, Alla Sheffer2, Daniel Cohen-Or3, Qingnan Zhou2, Oliver van Kaick1, and Andrea Tagliasacchi1 July 3, 2008
1 2 3
July 3, 2008, Copenhagen, Denmark
2
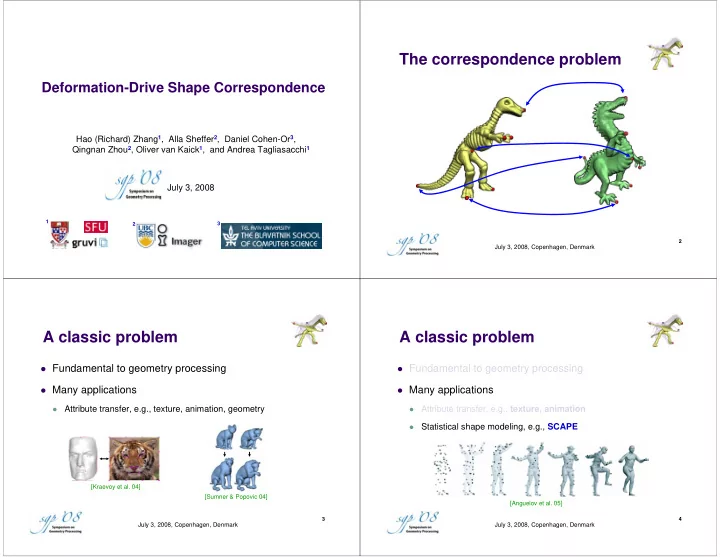
The correspondence problem
July 3, 2008, Copenhagen, Denmark
3
A classic problem
Fundamental to geometry processing Many applications
- Attribute transfer, e.g., texture, animation, geometry
[Sumner & Popovic 04] [Kraevoy et al. 04] July 3, 2008, Copenhagen, Denmark
4
A classic problem
Fundamental to geometry processing Many applications
- Attribute transfer, e.g., texture, animation
- Statistical shape modeling, e.g., SCAPE
[Anguelov et al. 05]