
SLIDE 1
January 10, 2017 Sam Siewert, AIAA SciTech 2017 - Fusion of Networked Sensor Systems
Software-Defined Multi-Spectral Imaging System Image and - - PowerPoint PPT Presentation
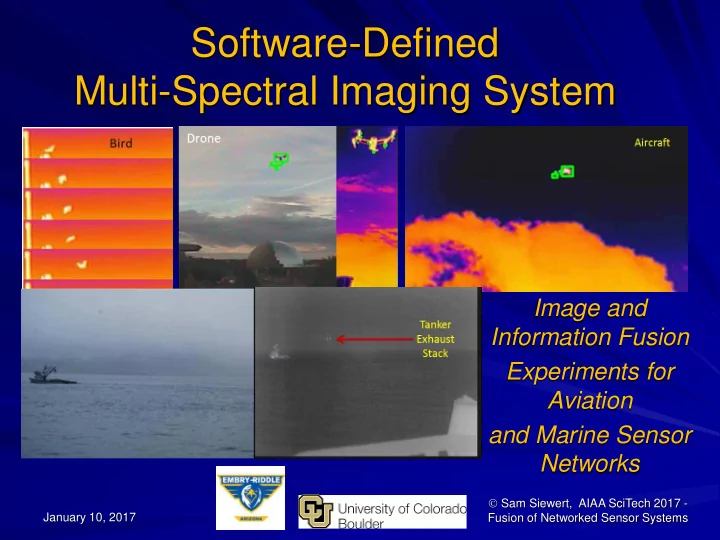
Software-Defined Multi-Spectral Imaging System Image and Information Fusion Experiments for Aviation and Marine Sensor Networks Sam Siewert, AIAA SciTech 2017 - January 10, 2017 Fusion of Networked Sensor Systems Goals and Objectives
January 10, 2017 Sam Siewert, AIAA SciTech 2017 - Fusion of Networked Sensor Systems
Feature Rich Software Defined Multi-Spectral Imaging System
– Geo-1: Southwestern Sonoran Desert, Colorado Plateau – Geo-2: Alaska and US Arctic Environments – In-situ monitors (rooftops, buoys, poles) – Share and Add Geos – Light Aircraft (ERAU RV-12) – Marine Vessel and UAS Detection, Tracking, Classification, Identification
Complimentary High Spatial, Temporal, Spectral Resolution
– Specific Geolocations, Campus, Airport, Marine Port – Compliments Satellite Remote Sensing – Cooperative ADS-B and S-AIS – Active RADAR/LIDAR Systems – Adds EO/IR and Acoustic Passive Sensing to Active Existing – Enhance Information Aggregation (flightradar24.com, MarineTraffic.com) – Networked Instruments with Image Fusion for Information Fusion – Low Power (Battery of Fuel Cell Extended Operation) < 10 Watts Peak
Low-Cost, Simplified Use Sensor Fusion Instrument - Open Reference Detect, Track, Classify and Identify Aerial and Marine Objects
– Determine Performance Methodology for EO/IR and Fusion Sensor Networks – Compare Candidate Methods to Baseline
Sam Siewert 2
– Sam Siewert, PI, Assistant, Prof. – Demi Matthew Vis – AE/SE Student – Ryan Claus – SE Student – Nicholas DiPinto – SE Student – Arctic Power Team – Power Team Poster
– Ram Krishnamurthy – MS EE – Surjith Singh – MS, ESE – Akshay Singh – ME, ESE – Shivasankar Gunasekaran – ME,ESE – Swaminath Badrinath – ME, ESE
– Randall Myers, Mentor Graphics
Sam Siewert 3
This material is based upon work supported by the U.S. Department
Homeland Security under Grant Award Number, DHS-14-ST-061-COE-001A-02. The views and conclusions contained in this document are those of the authors and should not be interpreted as necessarily representing the official policies, either expressed
implied,
the U.S. Department of Homeland Security.
– Sam Siewert, PI, Assistant, Prof. – Demi Matthew Vis – AE/SE Student – Ryan Claus – SE Student
– Ram Krishnamurthy – MS EE – Surjith Singh – MS, ESE – Akshay Singh – ME, ESE – Shivasankar Gunasekaran – ME,ESE – Omkar Seelam – ME, ESE
– Randall Myers, Mentor Graphics (PCB, CAD, Systems) – Joe Butler, Intel Corporation (IoT)
Sam Siewert 4
Sam Siewert 5
Sam Siewert 6
http://www.uscg.mil/d17/ArcticShield/Documents/USCG%20Arctic%20operations.pdf
Sam Siewert 7 http://www.oceanpowertechnologies.com/ http://www.esrl.noaa.gov/gmd/obop/brw/ http://www.uscg.mil/d17/cgcspar/
Sam Siewert 8
Sam Siewert – ERAU ICARUS Group
Sam Siewert 9
Sam Siewert 10
System Fusion For Uplink
Sam Siewert 11
Melt-water drainage
Sam Siewert 12
Sam Siewert 13
Exhaust stacks for Tanker at TAP ?? 25mm Athermal Lens - LWIR 25mm Visible 200mm DSLR Visible
Sam Siewert 14
Sam Siewert 15
Surfers in the Water Hand-held, Cutter Mounted, Buoys Complements Existing Helicopter and C130 FLIR (Field Test – June 2015, Malibu)
Trespassers at Night Shown on Jetty Hand-held, Port Drop-in-Place, Buoys Complements Existing Security Off-Grid Installations (Field Test – June 2015, San Pedro)
Sam Siewert 16
Trespassers at Night (Motion, Audio Cues)
Sam Siewert 17
Panchromatic, NIR, RGB
Jetson Tegra X1 With GP-GPU Co-Processing
Cloud Analytics and Machine Learning Flash SD Card (local database)
LWIR
Saliency & Behavioral Assessment Thermal Fusion Assessment
Many multi- spectral focal planes …
2D/3D Spatial Assessment
Sam Siewert 18
1) Sync’d Capture 2) Resolution Match 3) Image Registration 4) Detection 5) Classification 6) Identification
Sam Siewert 19
Sam Siewert 20
https://en.wikipedia.org/wiki/Precision_and_recall
PR best for Image Retrieval E.g. https://images.google.com/ ROC best for Target Detection
Sam Siewert 21
Sam Siewert 22
Sam Siewert 23
Sam Siewert 24
Sam Siewert 25
Sam Siewert 26
Sam Siewert 27
Methods to Evaluate UAS/Aircraft Shared NAS Instruments (EO/IR) Open Reference Design to Replicate (HW, FW, SW) Bench Testing – 2 Watts Idle, < 10 Watts Peak Operation Detection Performance Baseline to Compare To
– Test Candidate SOD Algorithms – Deep Learning ANN – Research Customized SOD
Please Download our Benchmarks, Detectors, Test Cases
– https://github.com/siewertserau/fusion_coproc_benchmarks – https://github.com/siewertserau/EOIR_detection – http://mercury.pr.erau.edu/~siewerts/extra/papers/AIAA-SDMSI-data-2017/
Open Source Hardware, Firmware, Software for Multispectral EO/IR and Information Fusion Applications Build a Drone Net – Campus, Port and at Multiple Geos!
Sam Siewert 28
Sam Siewert 29
Sam Siewert 30
Vis, “Software Defined Multi-Spectral Imaging for Arctic Sensor Networks”, SPIE Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXII, Baltimore, Maryland, April 2016.
2 S. Siewert, J. Shihadeh, Randall Myers, Jay Khandhar, Vitaly Ivanov, “Low Cost, High Performance and Efficiency
Computational Photometer Design”, SPIE Sensing Technology and Applications, SPIE Proceedings, Volume 9121, Baltimore, Maryland, May 2014.
3Piella, G. (2003). A general framework for multiresolution image fusion: from pixels to regions. Information fusion,
4(4), 259-280.
4Blum, R. S., & Liu, Z. (Eds.). (2005). Multi-sensor image fusion and its applications. CRC press. 5Liu, Z., Blasch, E., Xue, Z., Zhao, J., Laganiere, R., & Wu, W. (2012). Objective assessment of multiresolution image
fusion algorithms for context enhancement in night vision: a comparative study. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 34(1), 94-109.
6Simone, G., Farina, A., Morabito, F. C., Serpico, S. B., & Bruzzone, L. (2002). Image fusion techniques for remote
sensing applications. Information fusion, 3(1), 3-15.
7Mitchell, H. B. (2010). Image fusion: theories, techniques and applications. Springer Science & Business Media. 8Szeliski, R. (2010). Computer vision: algorithms and applications. Springer Science & Business Media. 9Sharma, G., Jurie, F., & Schmid, C. (2012, June). Discriminative spatial saliency for image classification. In Computer
Vision and Pattern Recognition (CVPR), 2012 IEEE Conference on (pp. 3506-3513). IEEE.
10Toet, A. (2011). Computational versus psychophysical bottom-up image saliency: A comparative evaluation study.
Pattern Analysis and Machine Intelligence, IEEE Transactions on, 33(11), 2131-2146.
Sam Siewert 31
11Valenti, R., Sebe, N., & Gevers, T. (2009, September). Image saliency by isocentric curvedness and color. In
Computer Vision, 2009 IEEE 12th International Conference on (pp. 2185-2192). IEEE.
12Wang, M., Konrad, J., Ishwar, P., Jing, K., & Rowley, H. (2011, June). Image saliency: From intrinsic to extrinsic
13Liu, F., & Gleicher, M. (2006, July). Region enhanced scale-invariant saliency detection. In Multimedia and Expo,
2006 IEEE International Conference on (pp. 1477-1480). IEEE.
14Cheng, M. M., Mitra, N. J., Huang, X., & Hu, S. M. (2014). Salientshape: Group saliency in image collections. The
Visual Computer, 30(4), 443-453.
15http://global.digitalglobe.com/sites/default/files/DG_WorldView2_DS_PROD.pdf 16http://www.spaceimagingme.com/downloads/sensors/datasheets/DG_WorldView3_DS_2014.pdf 17Richards, Mark A., James A. Scheer, and William A. Holm. Principles of modern radar. SciTech Pub., 2010. 18Brown, Christopher D., and Herbert T. Davis. "Receiver operating characteristics curves and related decision
measures: A tutorial." Chemometrics and Intelligent Laboratory Systems 80.1 (2006): 24-38.
19Wang, Bin, and Piotr Dudek. "A fast self-tuning background subtraction algorithm." Proceedings of the IEEE
Conference on Computer Vision and Pattern Recognition Workshops. 2014.
20Panagiotakis, Costas, et al. "Segmentation and sampling of moving object trajectories based on representativeness."
IEEE Transactions on Knowledge and Data Engineering 24.7 (2012): 1328-1343.
Sam Siewert 32
21Public SDMSI shared data web site for video sequences captured and used in two experiments presented in this
paper - http://mercury.pr.erau.edu/~siewerts/extra/papers/AIAA-SDMSI-data-2017/
22Perazzi, Federico, et al. "Saliency filters: Contrast based filtering for salient region detection." Computer Vision and
Pattern Recognition (CVPR), 2012 IEEE Conference on. IEEE, 2012.
23Achanta, Radhakrishna, et al. "SLIC superpixels compared to state-of-the-art superpixel methods." IEEE
transactions on pattern analysis and machine intelligence 34.11 (2012): 2274-2282.
24Hou, Xiaodi, and Liqing Zhang. "Saliency detection: A spectral residual approach." 2007 IEEE Conference on
Computer Vision and Pattern Recognition. IEEE, 2007.
25Global Contrast based Salient Region Detection. Ming-Ming Cheng, Niloy J. Mitra, Xiaolei Huang, Philip H. S. Torr,
Shi-Min Hu. IEEE Transactions on Pattern Analysis and Machine Intelligence (IEEE TPAMI), 37(3), 569-582, 2015.
26flightradar24.com, ADS-B, primary/secondary RADAR flight localization and aggregation services. 27Birch, Gabriel Carisle, John Clark Griffin, and Matthew Kelly Erdman. UAS Detection Classification and
Neutralization: Market Survey 2015. No. SAND2015-6365. Sandia National Laboratories (SNL-NM), Albuquerque, NM (United States), 2015.