
SLIDE 1
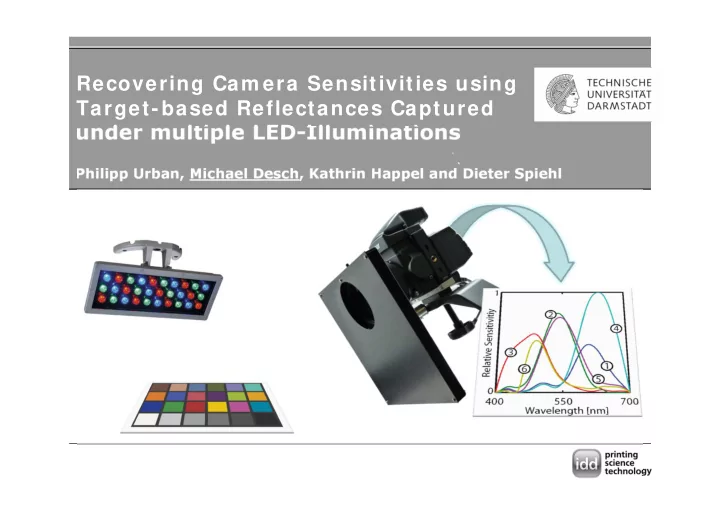
Recovering Cam era Sensitivities using Target-based Reflectances Captured under m ultiple LED-I llum inations
Philipp Urban, Michael Desch, Kathrin Happel and Dieter Spiehl
Recovering Cam era Sensitivities using Target-based Reflectances - - PowerPoint PPT Presentation
Recovering Cam era Sensitivities using Target-based Reflectances Captured under m ultiple LED-I llum inations Philipp Urban, Michael Desch, Kathrin Happel and Dieter Spiehl Motivation: Spectral Estim ation Channel m Channel 1 Illumination
Recovering Cam era Sensitivities using Target-based Reflectances Captured under m ultiple LED-I llum inations
Philipp Urban, Michael Desch, Kathrin Happel and Dieter Spiehl
Motivation: Spectral Estim ation
Channel 1 Channel mCan we calculate spectral reflectances from the camera image?
Illumination Scene Camera Camera Response Spectral Image
?
If yes, we could render/ reproduce the image for any illuminant
Motivation: Spectral Estim ation
If yes, we could estimate pigments used by an artist
Y . Zhao 2008
Motivation: Spectral Estim ation
Camera Sensitivities Required
Spectral Estim ation Approaches
Training-based Methods Model-based Methods Spatio-Spectral Methods
c1 cm Signal Processing
Multipoint spectral Measurement Methods
Use information to calculate spectral reflectance factor from camera responses Additional Information
Model-based Methods
e.g. Distribution
Cam era Model ( Linear, Continuous)
Reflectance Illuminant Camera Sensitivities
X X
c1 = = c cm l r [s1 sm]T
Camera Response (additive noise) Spectral stimulus
+
Required but usually unknown
Geometry factor* *Lambertian surface assumption
Diagonal matrix with illuminant as diagonal Reflectance vector i-th sensitivity vector i-th channel response Noise Geometry Factor
Cam era Model ( Linear, Discrete)
r = [ 50 65 85 80 60 58 55 50 45 40] T
Relative pow er\reflectance
Sensitivity Range Spectral representation by N-dimensional vector
Monochrom ator-based Training Stim uli
Monochromator Halon (r 1)
Wavelength Wavelength Sensitivity Sensitivity Wavelength Sensitivity
Sampling the Sensitivities with monochromatic light + Very high effective dimension* (~N) Very good sensitivity estimation without any additional assumptions *Hardeberg (2002)
Target-based Training Stim uli
Low effective dimension of stimuli for typical targets (broadband) Additional assumptions required (smoothness, non-negativity,…) Large influence of assumptions
LED+ Target-based Training Stim uli
…
High effective dimension of stimuli for typical targets (narrowband) Additional assumptions required (smoothness, non-negativity,…) Small influence of assumptions
m x k x n equations for recovering s1,…,sn
Problem : Measurem ent Geom etry
45°/0° Different measurement geometries:
and camera Geometry factor differs among patches and illuminants Non-linear equation system (sensitivities + geometry factors)
Solution: Use Chrom aticities
Divide each equation by the sum of channels (geometry factor can be reduced) Rearrange equations + consider noise is a (k · m · n) × (n · N) dimensional matrix that depends on Noise, assumed to be uncorrelated zero-mean Gaussian with covariance matrix where
W hat Assum ptions are Reasonable?
1
Sensitivities are non-negative
2
Sensitivities are likely to be smooth: Model wavelength-correlation using a Toeplitz-matrix
invalid Unlikely, but possible
3
Covariance matrix for can be modeled as block-diagonal (i.e. channel sensitivities are uncorrelated)
2 3
Likelihood model: Prior distribution: where
W hat Assum ptions are Reasonable?
Posterior distribution: where
2 3
Minimize: subject to:
Reconstruct Relative Sensitivities
1
Solve Constrained Maximum-A-Posteriori (MAP) Problem:
constraints
Experim ental Setup
1
Camera: Sinar 54H-based RGB camera (IR cutoff removed) Custom made two-stage filter wheel with yellow + blue filter Six channel camera (12 bit, 22MP)
2
Target: Color Checker measured using X-Rite’s EyeOne
Experim ental Setup
3
JUST Normlicht LED Color Viewing Light (six different types of LED)
4
UV/IR cutoff filter added to limit the sensitivity range of the camera to 400 – 700 nm [EyeOne measurements do not cover the real sensitivity range] Spectroradiometer to measure LED spectral power distribution (SPD) LED viewing Booth: Konica-Minolta CS1000
5
Results
Experimental Setup Training Stimuli (24 CC* x 6 LED = 144) *CC = Color Checker patches Effective dimension: 15 Color Checker only: 9
Results
Reconstructed Sensitivities Predicted vs. real channel responses for the training stimuli [Errors: mean ~ 0.3%, 95th < 0.8%, max < 1.35%]* *Error percentage is relative to the max. channel response
Results ( Test Stim uli)
Capture the ESSER TE221 Target under 6 LED illuminant [1698 different test stimuli] *Error percentage is relative to the max. channel response Predict channel responses using the reconstructed sensitivities Prediction error histogram*
Possible reason for large max error:
Conclusion
Camera sensitivities are required for many reflectance estimation methods If unknown they need to be measured/estimated Sensitivity reconstruction methods use assumptions (non-negativity, smoothness) and training stimuli: Different LED + Target Higher effective dimension of stimuli Smaller influence of assumptions Sensitivity reconstruction using Constrained Maximum-A-Posteriori (MAP) Test: 6-channel camera, 6-LED, Color Checker Results (Esser test target): small mean and 95th-, large max prediction errors
Thanks for your attention
Philipp Urban, Michael Desch, Kathrin Happel and Dieter Spiehl http: / / www.idd.tu-darmstadt.de/ color Thanks to Maria Fedutina, Tanja Kaulitz, Henri Kröling, Karsten Rettig, Manfred Jakobi for constructing, manufacturing and assembling the filter wheel and to the Deutsche Forschungsgemeinschaft for the sponsorship of the project