
SLIDE 1
cse457-04-image-processing 1
Image processing
cse457-04-image-processing 2
Reading
Jain, Kasturi, Schunck, Machine Vision. McGraw- Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4.
cse457-04-image-processing 3
What is an image?
We can think of an image as a function, f, from R2 to R: f( x, y ) gives the intensity of a channel at position ( x, y ) Realistically, we expect the image only to be defined over a rectangle, with a finite range:
- f: [a,b]x[c,d] [0,1]
A color image is just three functions pasted
- together. We can write this as a “vector-valued”
function:
( , ) ( , ) ( , ) ( , ) r x y f x y g x y b x y =
cse457-04-image-processing 4
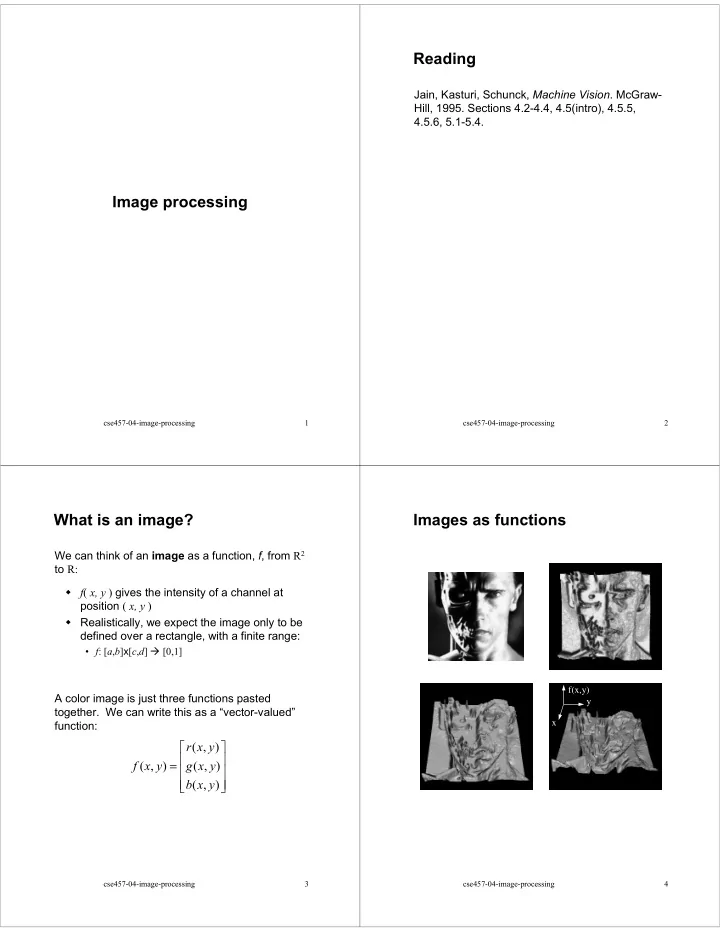
Images as functions
x y f(x,y)