
SLIDE 1
OptimizationTheoryand DualityforSVMs
Outline:
- Toolsfordesigninglearning(training)algorithms.
- Howtomaketheoptimizationproblemmoretractable?
- Adualrepresentationoftheoptimalhyperplaneintermsofthe
trainingexamples.
- Whatinsightdowegainfromthedualrepresentation?
- Whatarethepropertiesofthedualoptimizationproblem?
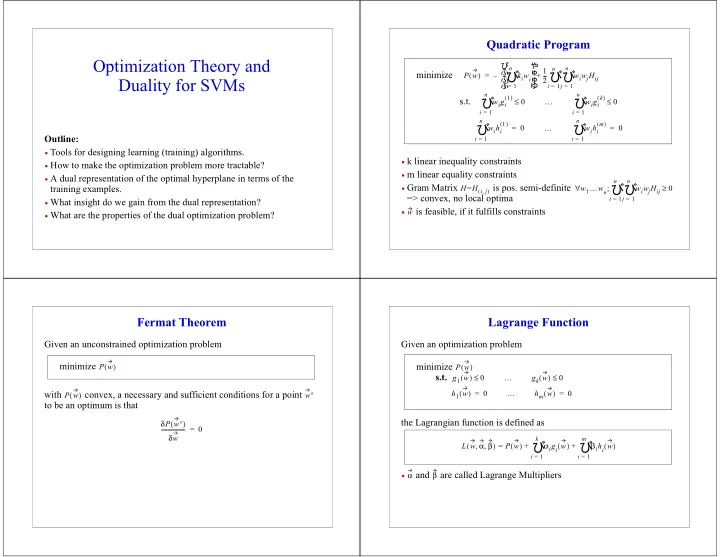
QuadraticProgram
- klinearinequalityconstraints
- mlinearequalityconstraints
- GramMatrix
ispos.semi-definite =>convex,nolocaloptima
- isfeasible,ifitfulfillsconstraints
minimize s.t.
P w ( ) kiwi
i 1 = n
- –
1 2
- wiwjHij
j 1 = n
- i
1 = n
- +
= wigi
1 ( ) i 1 = n
- ≤
… wigi
k ( ) i 1 = n
- ≤
wihi
1 ( ) i 1 = n
- =
… wihi
m ( ) i 1 = n
- =
H H i j
, ( )
= w1…wn wiwjHij
j 1 = n
- i
1 = n
- ;
∀ ≥ w
FermatTheorem
Givenanunconstrainedoptimizationproblem with convex,anecessaryandsufficientconditionsforapoint
- tobeanoptimumisthat
minimize
- P w
( ) P w ( ) w° δP w° ( ) δw
- =
LagrangeFunction
Givenanoptimizationproblem theLagrangianfunctionisdefinedas
- and arecalledLagrangeMultipliers
minimize s.t.
- P w
( ) g1 w ( ) ≤ … gk w ( ) ≤ h1 w ( ) = … hm w ( ) =
- L w α β
, , ( ) P w ( ) αigi w ( )
i 1 = k
- βihi w
( )
i 1 = m
- +
+ = α β