SLIDE 22 Introduction Splitting strategies The Parallel Replica Algorithm Conclusion
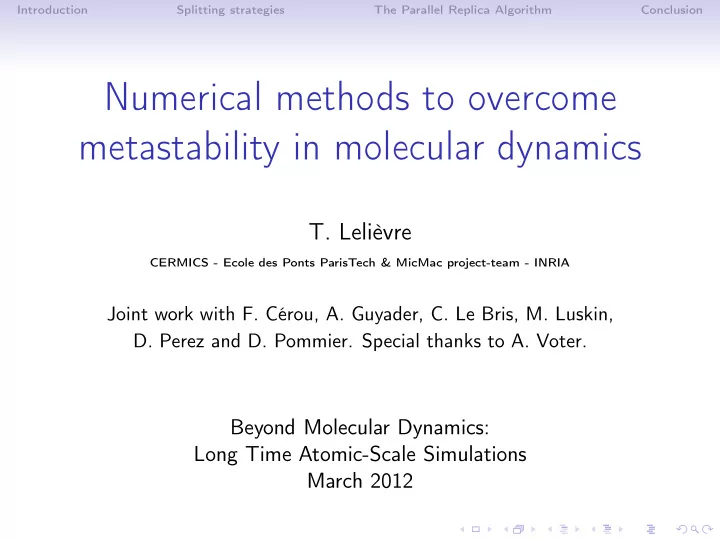
A 1D example
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0.5 1 1.5 2 2.5 3 3.5 4 4.5 probability time Distribution of the length of a reactive path, beta=1 algorithm, 1E5 paths DNS, 1E5 paths 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1 2 3 4 5 6 probability time Distribution of the length ofexpected time of a reactive path, beta=5 algorithm, 1E5 paths DNS, 1E5 paths 0.2 0.4 0.6 0.8 1 1.2 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 probability time Distribution of the length of a reactive path, beta=10 algorithm, 1E5 paths DNS, 1E4 paths 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 1 2 3 4 5 6 probability time Distribution of the length of a reactive path beta=1 beta=5 beta=10 beta=15 beta=20 beta=30 beta=40
Distributions of time-lengths of reactive paths. Comparison with DNS for β = 1, 5, 10 and distributions for β = 1, 5, 10, 15, 20, 30, 40.