SLIDE 1
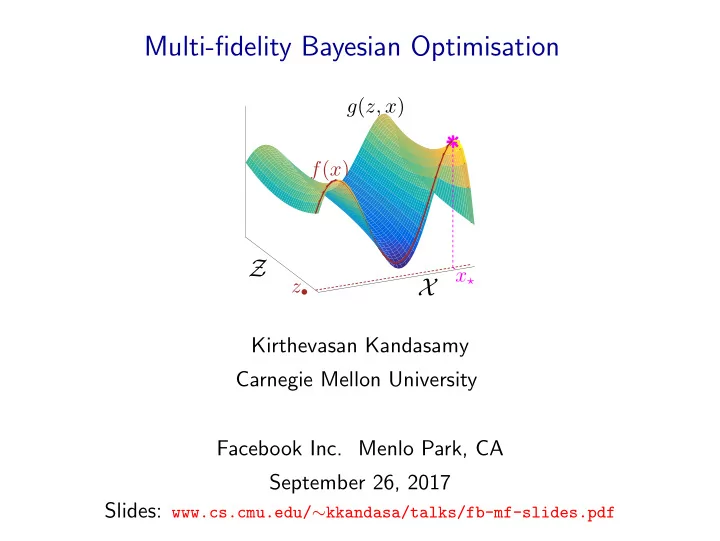
Multi-fidelity Bayesian Optimisation
x⋆
X
g(z, x) f(x) z•
Z
Kirthevasan Kandasamy Carnegie Mellon University Facebook Inc. Menlo Park, CA September 26, 2017 Slides: www.cs.cmu.edu/∼kkandasa/talks/fb-mf-slides.pdf
SLIDE 2
Slides are up on my website: www.cs.cmu.edu/∼kkandasa
Slides
SLIDE 3 Neural Network
hyper- parameters cross validation accuracy
- Train NN using given hyper-parameters
- Compute accuracy on validation set
1/30
SLIDE 4 Black-box Optimisation
Expensive Blackbox Function
1/30
SLIDE 5 Black-box Optimisation
Expensive Blackbox Function
Other Examples:
- ML estimation in astrophysics
- Pre-clinical drug discovery
- Optimal policy in autonomous driving
1/30
SLIDE 6 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
x f(x)
2/30
SLIDE 7 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
x f(x)
2/30
SLIDE 8 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
Let x⋆ = argmaxx f (x).
x f(x) x∗
f(x∗)
2/30
SLIDE 9 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
Let x⋆ = argmaxx f (x).
x f(x) x∗
f(x∗)
Simple Regret after n evaluations Sn = f (x⋆) − max
t=1,...,n f (xt).
2/30
SLIDE 10 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
Let x⋆ = argmaxx f (x).
x f(x) x∗
f(x∗)
Cumulative Regret after n evaluations Rn =
n
2/30
SLIDE 11 Black-box Optimisation
f : X → R is an expensive, black-box, noisy function, accessible
- nly via noisy evaluations.
Let x⋆ = argmaxx f (x).
x f(x) x∗
f(x∗)
Simple Regret after n evaluations Sn = f (x⋆) − max
t=1,...,n f (xt).
2/30
SLIDE 12 A walk-through Bayesian Optimisation with Gaussian Processes
◮ Gaussian Processes (GPs) ◮ GP-UCB: An algorithm for Bayesian Optimisation (BO)
3/30
SLIDE 13 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R.
4/30
SLIDE 14 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R. Functions with no observations
x f(x)
4/30
SLIDE 15 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R. Prior GP
x f(x)
4/30
SLIDE 16 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R. Observations
x f(x)
4/30
SLIDE 17 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R. Posterior GP given observations
x f(x)
4/30
SLIDE 18 Gaussian Processes (GP)
GP(µ, κ): A distribution over functions from X to R. Posterior GP given observations
x f(x)
Completely characterised by mean function µ : X → R, and covariance kernel κ : X × X → R. After t observations, f (x) ∼ N( µt(x), σ2
t (x) ).
4/30
SLIDE 19 Gaussian Process Bandit (Bayesian) Optimisation
Model f ∼ GP(0, κ). Gaussian Process Upper Confidence Bound (GP-UCB)
(Srinivas et al. 2010)
x f(x)
5/30
SLIDE 20 Gaussian Process Bandit (Bayesian) Optimisation
Model f ∼ GP(0, κ). Gaussian Process Upper Confidence Bound (GP-UCB)
(Srinivas et al. 2010)
x f(x) 1) Construct posterior GP.
5/30
SLIDE 21 Gaussian Process Bandit (Bayesian) Optimisation
Model f ∼ GP(0, κ). Gaussian Process Upper Confidence Bound (GP-UCB)
(Srinivas et al. 2010)
x f(x) ϕt = µt−1 + β1/2
t
σt−1 1) Construct posterior GP. 2) ϕt = µt−1 + β1/2
t
σt−1 is a UCB.
5/30
SLIDE 22 Gaussian Process Bandit (Bayesian) Optimisation
Model f ∼ GP(0, κ). Gaussian Process Upper Confidence Bound (GP-UCB)
(Srinivas et al. 2010)
x f(x) ϕt = µt−1 + β1/2
t
σt−1
xt
1) Construct posterior GP. 2) ϕt = µt−1 + β1/2
t
σt−1 is a UCB. 3) Choose xt = argmaxx ϕt(x).
5/30
SLIDE 23 Gaussian Process Bandit (Bayesian) Optimisation
Model f ∼ GP(0, κ). Gaussian Process Upper Confidence Bound (GP-UCB)
(Srinivas et al. 2010)
x f(x) ϕt = µt−1 + β1/2
t
σt−1
xt
1) Construct posterior GP. 2) ϕt = µt−1 + β1/2
t
σt−1 is a UCB. 3) Choose xt = argmaxx ϕt(x). 4) Evaluate f at xt.
5/30
SLIDE 24 GP-UCB
(Srinivas et al. 2010)
x f(x)
6/30
SLIDE 25 GP-UCB
(Srinivas et al. 2010)
t = 1 x f(x)
6/30
SLIDE 26 GP-UCB
(Srinivas et al. 2010)
t = 2 x f(x)
6/30
SLIDE 27 GP-UCB
(Srinivas et al. 2010)
t = 3 x f(x)
6/30
SLIDE 28 GP-UCB
(Srinivas et al. 2010)
t = 4 x f(x)
6/30
SLIDE 29 GP-UCB
(Srinivas et al. 2010)
t = 5 x f(x)
6/30
SLIDE 30 GP-UCB
(Srinivas et al. 2010)
t = 6 x f(x)
6/30
SLIDE 31 GP-UCB
(Srinivas et al. 2010)
t = 7 x f(x)
6/30
SLIDE 32 GP-UCB
(Srinivas et al. 2010)
t = 11 x f(x)
6/30
SLIDE 33 GP-UCB
(Srinivas et al. 2010)
t = 25 x f(x)
6/30
SLIDE 34 GP-UCB
xt = argmax
x
µt−1(x) + β1/2
t
σt−1(x)
◮ µt−1: Exploitation ◮ σt−1: Exploration ◮ βt controls the tradeoff.
βt ≍ log t.
7/30
SLIDE 35 GP-UCB
xt = argmax
x
µt−1(x) + β1/2
t
σt−1(x)
◮ µt−1: Exploitation ◮ σt−1: Exploration ◮ βt controls the tradeoff.
βt ≍ log t. GP-UCB, κ is an SE kernel
(Srinivas et al. 2010)
w.h.p Sn = f (x⋆) − max
t=1,...,n f (xt)
n
ignores constants and polylog terms.
7/30
SLIDE 36 Big picture: scaling up black-box optimisation
8/30
SLIDE 37 Big picture: scaling up black-box optimisation
◮ Optimising in high dimensional spaces
e.g.: Tuning models with several hyper-parameters Additive models for f lead to statistically and computationally tractable algorithms.
(Kandasamy et al. ICML 2015)
8/30
SLIDE 38 Big picture: scaling up black-box optimisation
◮ Optimising in high dimensional spaces
e.g.: Tuning models with several hyper-parameters Additive models for f lead to statistically and computationally tractable algorithms.
(Kandasamy et al. ICML 2015)
◮ Parallelising function evaluations
Randomised algorithms scale well to a large number of parallel workers.
(Kandasamy et al. Arxiv 2017)
8/30
SLIDE 39 Big picture: scaling up black-box optimisation
◮ Optimising in high dimensional spaces
e.g.: Tuning models with several hyper-parameters Additive models for f lead to statistically and computationally tractable algorithms.
(Kandasamy et al. ICML 2015)
◮ Parallelising function evaluations
Randomised algorithms scale well to a large number of parallel workers.
(Kandasamy et al. Arxiv 2017)
Extends beyond GPs.
8/30
SLIDE 40 This work: What if we have cheap approximations to f ?
(Kandasamy et al. NIPS 2016a&b, Kandasamy et al. ICML 2017)
9/30
SLIDE 41 This work: What if we have cheap approximations to f ?
(Kandasamy et al. NIPS 2016a&b, Kandasamy et al. ICML 2017)
- 1. Hyper-parameter tuning: Train & validate with a subset of the
data, and/or early stopping before convergence. E.g. Bandwidth (ℓ) selection in kernel density estimation.
9/30
SLIDE 42 This work: What if we have cheap approximations to f ?
(Kandasamy et al. NIPS 2016a&b, Kandasamy et al. ICML 2017)
- 1. Hyper-parameter tuning: Train & validate with a subset of the
data, and/or early stopping before convergence. E.g. Bandwidth (ℓ) selection in kernel density estimation.
- 2. Computational astrophysics: cosmological simulations and
numerical computations with less granularity.
- 3. Autonomous driving: simulation vs real world experiment.
9/30
SLIDE 43 Prior work in Multi-fidelity Methods
For specific applications,
◮ Industrial design
(Forrester et al. 2007)
◮ Hyper-parameter tuning
(Agarwal et al. 2011, Klein et al. 2015, Li et al. 2016)
◮ Active learning
(Zhang & Chaudhuri 2015)
◮ Robotics
(Cutler et al. 2014)
Multi-fidelity optimisation
(Huang et al. 2006, Forrester et al. 2007, March & Wilcox 2012, Poloczek et al. 2016)
10/30
SLIDE 44 Outline
- 1. A finite number of approximations
(Kandasamy et al. NIPS 2016b)
- Formalism, intuition and challenges
- Algorithm
- Theoretical results
- Experiments
- 2. A continuous spectrum of approximations
(Kandasamy et al. ICML 2017)
- Formalism
- Algorithm
- Theoretical results
- Experiments
11/30
SLIDE 45 Outline
- 1. A finite number of approximations
(Kandasamy et al. NIPS 2016b)
- Formalism, intuition and challenges
- Algorithm
- Theoretical results
- Experiments
- 2. A continuous spectrum of approximations
(Kandasamy et al. ICML 2017)
- Formalism
- Algorithm
- Theoretical results
- Experiments
11/30
SLIDE 46 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (2) = f ◮ Optimise f = f (2).
x⋆ = argmaxx f (2)(x).
◮ But ..
12/30
SLIDE 47 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2) ◮ Optimise f = f (2).
x⋆ = argmaxx f (2)(x).
◮ But .. we have an approximation f (1) to f (2). ◮ f (1) costs λ(1),
f (2) costs λ(2). λ(1) < λ(2). “cost”: could be computation time, money etc.
12/30
SLIDE 48 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2) ◮ Optimise f = f (2).
x⋆ = argmaxx f (2)(x).
◮ But .. we have an approximation f (1) to f (2). ◮ f (1) costs λ(1),
f (2) costs λ(2). λ(1) < λ(2). “cost”: could be computation time, money etc.
◮ f (1), f (2) ∼ GP(0, κ). ◮ f (2) − f (1)∞ ≤ ζ(1).
ζ(1) is known.
12/30
SLIDE 49 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
At time t: Determine the point xt ∈ X and fidelity mt ∈ {1, 2} for querying.
13/30
SLIDE 50 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
At time t: Determine the point xt ∈ X and fidelity mt ∈ {1, 2} for querying. End Goal: Maximise f (2). Don’t care for maximum of f (1).
13/30
SLIDE 51 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
At time t: Determine the point xt ∈ X and fidelity mt ∈ {1, 2} for querying. End Goal: Maximise f (2). Don’t care for maximum of f (1). Simple Regret: S(Λ) = f (2)(x⋆) − max
t : mt=2 f (2)(xt)
Capital Λ ← amount of the resource spent. E.g. seconds or dollars.
13/30
SLIDE 52 Multi-fidelity Bandit Optimisation in 2 Fidelities (1 Approximation)
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
At time t: Determine the point xt ∈ X and fidelity mt ∈ {1, 2} for querying. End Goal: Maximise f (2). Don’t care for maximum of f (1). Simple Regret: S(Λ) = f (2)(x⋆) − max
t : mt=2 f (2)(xt)
Capital Λ ← amount of the resource spent. E.g. seconds or dollars.
No reward for querying f (1), but use cheap evaluations to guide search for x⋆ at f (2).
13/30
SLIDE 53 Challenges
x⋆ f (2) = f
13/30
SLIDE 54 Challenges
x⋆
+ζ(1) −ζ(1)
f (2)
13/30
SLIDE 55 Challenges
x⋆ f (1) f (2)
13/30
SLIDE 56 Challenges
x⋆ f (1) f (2)
◮ f (1) is not just a noisy version of f (2).
13/30
SLIDE 57 Challenges
x⋆ x(1)
⋆
f (1) f (2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
13/30
SLIDE 58 Challenges
x⋆ x(1)
⋆
f (1) f (2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
13/30
SLIDE 59 Challenges
x⋆ x(1)
⋆
f (1) f (2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
13/30
SLIDE 60 Challenges
x⋆ x(1)
⋆
f (1) f (2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
13/30
SLIDE 61 Challenges
x⋆ x(1)
⋆
f (1) f (2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
◮ Need to explore f (2) sufficiently well around the high valued
regions of f (1) – but at a not too large region.
13/30
SLIDE 62 Challenges
x⋆ x(1)
⋆
f(1) f(2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
◮ Need to explore f (2) sufficiently well around the high valued
regions of f (1) – but at a not too large region.
13/30
SLIDE 63 Challenges
x⋆ x(1)
⋆
f(1) f(2)
◮ f (1) is not just a noisy version of f (2). ◮ Cannot just maximise f (1).
x(1)
⋆
is suboptimal for f (2).
◮ Need to explore f (2) sufficiently well around the high valued
regions of f (1) – but at a not too large region.
Key Message: We will explore X using f (1) and use f (2) mostly in a promising region Xα.
13/30
SLIDE 64 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
Multi-fidelity Gaussian Process Upper Confidence Bound
x⋆ f (1) f (2)
14/30
SLIDE 65 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
Multi-fidelity Gaussian Process Upper Confidence Bound
x⋆ f (1) f (2) ◮ Construct Upper Confidence Bound ϕt for f (2).
Choose point xt = argmaxx∈X ϕt(x).
14/30
SLIDE 66 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
Multi-fidelity Gaussian Process Upper Confidence Bound
x⋆ xt t = 11 f (1) f (2) ◮ Construct Upper Confidence Bound ϕt for f (2).
Choose point xt = argmaxx∈X ϕt(x).
ϕ(1)
t (x) =
µ(1)
t−1(x) + β1/2 t
σ(1)
t−1(x) +ζ(1)
ϕ(2)
t (x) = µ(2) t−1(x) + β1/2 t
σ(2)
t−1(x)
ϕt(x) = min{ ϕ(1)
t (x), ϕ(2) t (x) } 14/30
SLIDE 67 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
Multi-fidelity Gaussian Process Upper Confidence Bound
x⋆ xt t = 11 f (1) f (2)
γ(1)
mt = 2
◮ Construct Upper Confidence Bound ϕt for f (2).
Choose point xt = argmaxx∈X ϕt(x).
ϕ(1)
t (x) =
µ(1)
t−1(x) + β1/2 t
σ(1)
t−1(x) +ζ(1)
ϕ(2)
t (x) = µ(2) t−1(x) + β1/2 t
σ(2)
t−1(x)
ϕt(x) = min{ ϕ(1)
t (x), ϕ(2) t (x) }
◮ Choose fidelity mt =
if β1/2
t
σ(1)
t−1(xt) > γ(1)
2
14/30
SLIDE 68 Theoretical Results for MF-GP-UCB
GP-UCB, κ is an SE kernel
(Srinivas et al. 2010)
w.h.p S(Λ) = f (2)(x⋆) − max
t : mt=2 f (2)(xt)
Λ
15/30
SLIDE 69 Theoretical Results for MF-GP-UCB
GP-UCB, κ is an SE kernel
(Srinivas et al. 2010)
w.h.p S(Λ) = f (2)(x⋆) − max
t : mt=2 f (2)(xt)
Λ MF-GP-UCB, κ is an SE kernel
(Kandasamy et al. NIPS 2016b)
w.h.p ∀α > 0, S(Λ)
Λ +
Λ2−α Xα = {x : f (2)(x⋆) − f (1)(x) ≤ Cαζ(1)} Good approximation (small ζ(1)) = ⇒ vol(Xα) ≪ vol(X).
15/30
SLIDE 70 MF-GP-UCB with multiple approximations
16/30
SLIDE 71 MF-GP-UCB with multiple approximations
Things work out.
16/30
SLIDE 72 Experiment: Viola & Jones Face Detection
22 Threshold values for each cascade. (d = 22) Fidelities with dataset sizes (300, 3000). (M = 2)
1000 2000 3000 4000 5000 6000 7000 8000 0.1 0.15 0.2 0.25 0.3 0.35 17/30
SLIDE 73 Experiment: Cosmological Maximum Likelihood Inference
◮ Type Ia Supernovae Data ◮ Maximum likelihood inference for 3 cosmological parameters:
◮ Hubble Constant H0 ◮ Dark Energy Fraction ΩΛ ◮ Dark Matter Fraction ΩM
◮ Likelihood: Robertson Walker metric
(Robertson 1936)
Requires numerical integration for each point in the dataset.
18/30
SLIDE 74 Experiment: Cosmological Maximum Likelihood Inference
3 cosmological parameters. (d = 3) Fidelities: integration on grids of size (102, 104, 106). (M = 3)
500 1000 1500 2000 2500 3000 3500
5 10 19/30
SLIDE 75 MF-GP-UCB Synthetic Experiment: Hartmann-3D
d = 3, M = 3
0.5 1 1.5 2 2.5 3 3.5 5 10 15 20 25 30 35 40
Query frequencies for Hartmann-3D f (3)(x)
m=1 m=2 m=3
19/30
SLIDE 76 Outline
- 1. A finite number of approximations
(Kandasamy et al. NIPS 2016b)
- Formalism, intuition and challenges
- Algorithm
- Theoretical results
- Experiments
- 2. A continuous spectrum of approximations
(Kandasamy et al. ICML 2017)
- Formalism
- Algorithm
- Theoretical results
- Experiments
20/30
SLIDE 77 Why continuous approximations?
- Use an arbitrary amount of data?
21/30
SLIDE 78 Why continuous approximations?
- Use an arbitrary amount of data?
- Iterative algorithms: use arbitrary number of iterations?
21/30
SLIDE 79 Why continuous approximations?
- Use an arbitrary amount of data?
- Iterative algorithms: use arbitrary number of iterations?
E.g. Train an ML model with N• data and T• iterations.
- But use N < N• data and T < T• iterations to approximate
cross validation performance at (N•, T•).
21/30
SLIDE 80 Why continuous approximations?
- Use an arbitrary amount of data?
- Iterative algorithms: use arbitrary number of iterations?
E.g. Train an ML model with N• data and T• iterations.
- But use N < N• data and T < T• iterations to approximate
cross validation performance at (N•, T•). Approximations from a continuous 2D “fidelity space” (N, T).
21/30
SLIDE 81 Why continuous approximations?
- Use an arbitrary amount of data?
- Iterative algorithms: use arbitrary number of iterations?
E.g. Train an ML model with N• data and T• iterations.
- But use N < N• data and T < T• iterations to approximate
cross validation performance at (N•, T•). Approximations from a continuous 2D “fidelity space” (N, T). Scientific studies: Simulations and numerical computations at varying continuous levels of granularity.
21/30
SLIDE 82 Multi-fidelity Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
X Z
A fidelity space Z and domain X
Z ← all (N, T) values. X ← all hyper-parameter values.
22/30
SLIDE 83 Multi-fidelity Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
X
g(z, x)
Z
A fidelity space Z and domain X
Z ← all (N, T) values. X ← all hyper-parameter values.
g : Z × X → R.
g([N, T], x) ← cv accuracy when training with N data for T iterations at hyper-parameter x.
22/30
SLIDE 84 Multi-fidelity Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
X
g(z, x) f(x) z•
Z
A fidelity space Z and domain X
Z ← all (N, T) values. X ← all hyper-parameter values.
g : Z × X → R.
g([N, T], x) ← cv accuracy when training with N data for T iterations at hyper-parameter x.
We wish to optimise f (x) = g(z•, x) where z• ∈ Z.
z• = [N•, T•].
22/30
SLIDE 85 Multi-fidelity Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
x⋆
X
g(z, x) f(x) z•
Z
A fidelity space Z and domain X
Z ← all (N, T) values. X ← all hyper-parameter values.
g : Z × X → R.
g([N, T], x) ← cv accuracy when training with N data for T iterations at hyper-parameter x.
We wish to optimise f (x) = g(z•, x) where z• ∈ Z.
z• = [N•, T•].
End Goal: Find x⋆ = argmaxx f (x).
22/30
SLIDE 86 Multi-fidelity Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
x⋆
X
g(z, x) f(x) z•
Z
A fidelity space Z and domain X
Z ← all (N, T) values. X ← all hyper-parameter values.
g : Z × X → R.
g([N, T], x) ← cv accuracy when training with N data for T iterations at hyper-parameter x.
We wish to optimise f (x) = g(z•, x) where z• ∈ Z.
z• = [N•, T•].
End Goal: Find x⋆ = argmaxx f (x). A cost function, λ : Z → R+.
λ(z) = λ(N, T) = O(N2T).
Z z• λ(z)
22/30
SLIDE 87 Multi-fidelity Simple Regret
(Kandasamy et al. ICML 2017)
x⋆
X
g(z, x) f(x) z•
Z
Z z• λ(z) End Goal: Find x⋆ = argmaxx f (x).
23/30
SLIDE 88 Multi-fidelity Simple Regret
(Kandasamy et al. ICML 2017)
x⋆
X
g(z, x) f(x) z•
Z
Z z• λ(z) End Goal: Find x⋆ = argmaxx f (x).
Simple Regret after capital Λ:
S(Λ) = f (x⋆) − max
t: zt=z• f (xt).
Λ ← amount of a resource spent, e.g. computation time or money.
23/30
SLIDE 89 Multi-fidelity Simple Regret
(Kandasamy et al. ICML 2017)
x⋆
X
g(z, x) f(x) z•
Z
Z z• λ(z) End Goal: Find x⋆ = argmaxx f (x).
Simple Regret after capital Λ:
S(Λ) = f (x⋆) − max
t: zt=z• f (xt).
Λ ← amount of a resource spent, e.g. computation time or money. No reward for maximising low fidelities, but use cheap evaluations at z = z• to speed up search for x⋆.
23/30
SLIDE 90 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
24/30
SLIDE 91 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+
24/30
SLIDE 92 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x)
24/30
SLIDE 93 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x)
24/30
SLIDE 94 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x) (2) Zt ≈ {z•} ∪
- z : σt−1(z, xt) ≥ γ(z)
- (3)
zt = argmin
z∈Zt
λ(z) (cheapest z in Zt)
24/30
SLIDE 95 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x) (2) Zt ≈ {z•} ∪
- z : σt−1(z, xt) ≥ γ(z)
- (3)
zt = argmin
z∈Zt
λ(z) (cheapest z in Zt)
24/30
SLIDE 96 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x) (2) Zt ≈ {z•} ∪
- z : σt−1(z, xt) ≥ γ(z)
- (3)
zt = argmin
z∈Zt
λ(z) (cheapest z in Zt)
24/30
SLIDE 97 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x) (2) Zt ≈ {z•} ∪
- z : σt−1(z, xt) ≥ γ(z)
- (3)
zt = argmin
z∈Zt
λ(z) (cheapest z in Zt)
24/30
SLIDE 98 BOCA: Bayesian Optimisation with Continuous Approximations
(Kandasamy et al. ICML 2017)
Model g ∼ GP(0, κ) and com- pute posterior GP: mean µt−1 : Z × X → R std-dev σt−1 : Z × X → R+ (1) xt ← maximise upper confidence bound for f (x) = g(z•, x). xt = argmax
x∈X
µt−1(z•, x) + β1/2
t
σt−1(z•, x) (2) Zt ≈ {z•} ∪
λ(z) λ(z•) q ξ(z)
zt = argmin
z∈Zt
λ(z) (cheapest z in Zt)
24/30
SLIDE 99 Theoretical Results for BOCA
g ∼ GP(0, κ), κ : (Z × X)2 → R. κ([z, x], [z′, x′]) = κX (x, x′) · κZ(z, z′)
25/30
SLIDE 100 Theoretical Results for BOCA
g ∼ GP(0, κ), κ : (Z × X)2 → R. κ([z, x], [z′, x′]) = κX (x, x′) · κZ(z, z′)
x⋆
X
g(z, x) f(x) z•
Z “good”
x⋆ g(z, x)
X
f(x) z•
Z “bad”
25/30
SLIDE 101 Theoretical Results for BOCA
g ∼ GP(0, κ), κ : (Z × X)2 → R. κ([z, x], [z′, x′]) = κX (x, x′) · κZ(z, z′)
x⋆
X
g(z, x) f(x) z•
Z “good” large hZ
x⋆ g(z, x)
X
f(x) z•
Z “bad” small hZ E.g.: If κZ is an SE kernel, bandwidth hZ controls smoothness.
25/30
SLIDE 102 Theoretical Results for BOCA
GP-UCB κX is an SE kernel,
(Srinivas et al. 2010)
w.h.p S(Λ)
Λ
26/30
SLIDE 103 Theoretical Results for BOCA
GP-UCB κX is an SE kernel,
(Srinivas et al. 2010)
w.h.p S(Λ)
Λ BOCA κX , κZ are SE kernels,
(Kandasamy et al. ICML 2017)
w.h.p ∀α > 0, S(Λ)
Λ +
Λ2−α Xα =
1 hZ
SLIDE 104 Theoretical Results for BOCA
GP-UCB κX is an SE kernel,
(Srinivas et al. 2010)
w.h.p S(Λ)
Λ BOCA κX , κZ are SE kernels,
(Kandasamy et al. ICML 2017)
w.h.p ∀α > 0, S(Λ)
Λ +
Λ2−α Xα =
1 hZ
- If hZ is large (good approximations), vol(Xα) ≪ vol(X),
and BOCA is much better than GP-UCB.
26/30
SLIDE 105 Experiment: SVM with 20 News Groups
Tune two hyper-parameters for the SVM. Dataset has N• = 15K data and use T• = 100 iterations. But can choose N ∈ [5K, 15K] or T ∈ [20, 100]
(2D fidelity space).
0.89 0.895 0.9 0.905 0.91 0.915 500 1000 1500 2000
More synthetic & real experiments in the paper.
27/30
SLIDE 106 Open Questions, Challenges & Take-aways
◮ If you know the relationship between the approximations
(fidelities), you should use it. Estimating it from data on the fly is not impossible, but difficult.
28/30
SLIDE 107 Open Questions, Challenges & Take-aways
◮ If you know the relationship between the approximations
(fidelities), you should use it. Estimating it from data on the fly is not impossible, but difficult.
◮ There might be better/different models for the
approximations that might suit your problem.
- E.g. approximations that are good in certain regions but bad
in other regions.
28/30
SLIDE 108 Summary
Multi-fidelity K-armed bandits
(Kandasamy et al. NIPS 2016a)
◮ An algorithm MF-UCB and an upper bound on the regret. ◮ An almost matching lower bound.
29/30
SLIDE 109 Summary
Multi-fidelity K-armed bandits
(Kandasamy et al. NIPS 2016a)
◮ An algorithm MF-UCB and an upper bound on the regret. ◮ An almost matching lower bound.
Key takeaways
(Kandasamy et al. NIPS 2016a, Kandasamy et al. NIPS 2016b, Kandasamy et al. ICML 2017)
◮ Upper confidence bound strategy ◮ Choose higher fidelity only after controlling uncertainty at
lower fidelities.
◮ Explore the entire space using cheap low fidelities and reserve
expensive higher fidelities for promising candidates.
◮ Theoretically/empirically outperforms strategies which ignore
the approximations.
29/30
SLIDE 110 Jeff Schneider Barnabas Poczos Junier Oliva Gautam Dasarathy
Thank you.
Code for MF-GP-UCB: github.com/kirthevasank/mf-gp-ucb Slides: www.cs.cmu.edu/∼kkandasa/talks/fb-mf-slides.pdf
30/30
SLIDE 111
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
SLIDE 112
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
SLIDE 113 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
µ(1)
t−1 + β1/2 t
σ(1)
t−1
t = 6
SLIDE 114 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2)
ϕ(1)
t
= µ(1)
t−1 + β1/2 t
σ(1)
t−1 + ζ(1)
t = 6
SLIDE 115
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2) ϕ(1)
t
ϕ(2)
t
t = 6
SLIDE 116
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ f (1) f (2) ϕ(1)
t
ϕ(2)
t
ϕt t = 6
SLIDE 117
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ xt t = 6 ϕ(1)
t
ϕ(2)
t
ϕt f (1) f (2)
SLIDE 118 MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ xt t = 6 ϕ(1)
t
ϕ(2)
t
ϕt f (1) f (2)
β1/2
t
σ(1)
t−1(x)
γ(1)
mt = 1
SLIDE 119
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ xt t = 10 f (1) f (2)
γ(1)
mt = 2
SLIDE 120
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ xt t = 11 f (1) f (2)
γ(1)
mt = 2
SLIDE 121
MF-GP-UCB
(Kandasamy et al. NIPS 2016b)
x⋆ xt t = 14 f (1) f (2)
γ(1)
mt = 2