
SLIDE 1
Hybrid Models for Hybrid Models for Analysis and Control Design Analysis and Control Design
Alberto Bemporad Alberto Bemporad
- Dip. di
- Dip. di Ingegneria
Ingegneria dell’Informazione dell’Informazione Università Università degli degli Studi Studi di Siena di Siena
Università degli Studi di Siena Facoltà di Ingegneria
bemporad@dii.unisi.it bemporad@dii.unisi.it http:// http://www.dii.unisi.it/~bemporad www.dii.unisi.it/~bemporad continuous dynamical system
discrete inputs
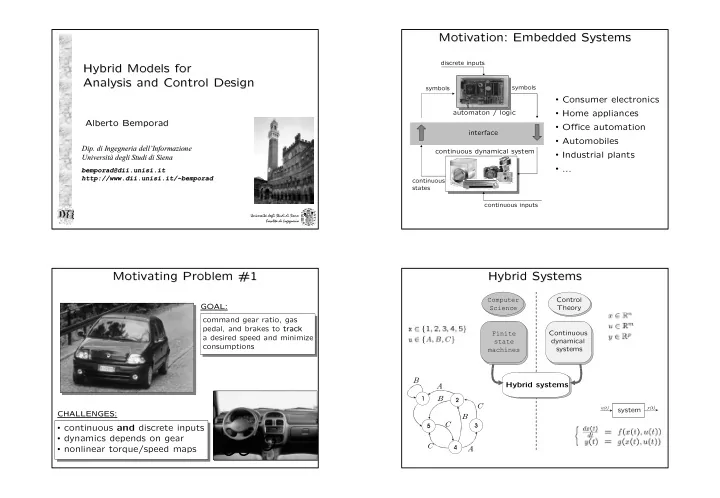
Motivation: Embedded Systems Motivation: Embedded Systems
symbols symbols continuous states continuous inputs
automaton / logic interface
- Consumer electronics
- Home appliances
- Office automation
- Automobiles
- Industrial plants
- ...
Motivating Problem #1 Motivating Problem #1
GOAL GOAL: command gear ratio, gas pedal, and brakes to trac ack k a desired speed and minimize consumptions CHALLE LLENG NGES:
- continuous and discrete inputs
- dynamics depends on gear
- nonlinear torque/speed maps
Hybrid systems
Hybrid Systems Hybrid Systems
Computer Science Control Theory Finite state machines Continuous dynamical systems system
u(t) y(t)