
SLIDE 1
by D.Dibbern and A. Werdermann
Modular Robots Modular Robots
by D. Dibbern and A. Werdermann by D. Dibbern and A. Werdermann
Modular Robots Modular Robots by D. Dibbern and A. Werdermann by - - PowerPoint PPT Presentation
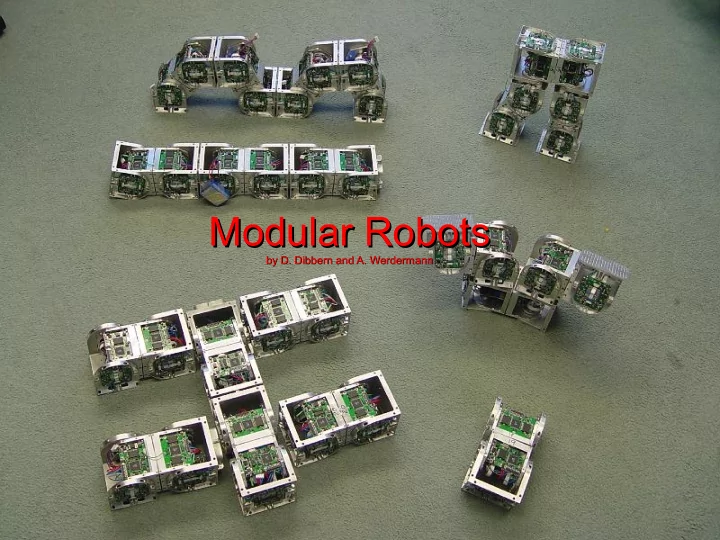
Modular Robots Modular Robots by D. Dibbern and A. Werdermann by D. Dibbern and A. Werdermann by D.Dibbern and A. Werdermann Introduction to modular robots Introduction Definition History General Research Challenges
by D.Dibbern and A. Werdermann
by D. Dibbern and A. Werdermann by D. Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
– Linear Gait
– Turning Gait
– Rolling Gait
– Lateral Shift
by D.Dibbern and A. Werdermann
– More adaptive than conventional systems – may change morphologies suited for new tasks
– Parts are interchangeable leading to self-repair
– Because many copies of one (or relatively few) type
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
– No gravity, no weight
– Waterproof
– Ability to cross every surface and obstacle
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
– Replicator (Stargate SG-I) – T-1000 (Terminator 2)
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann
by D.Dibbern and A. Werdermann