
SLIDE 1
MIMO systems
Systems with more than one input and output
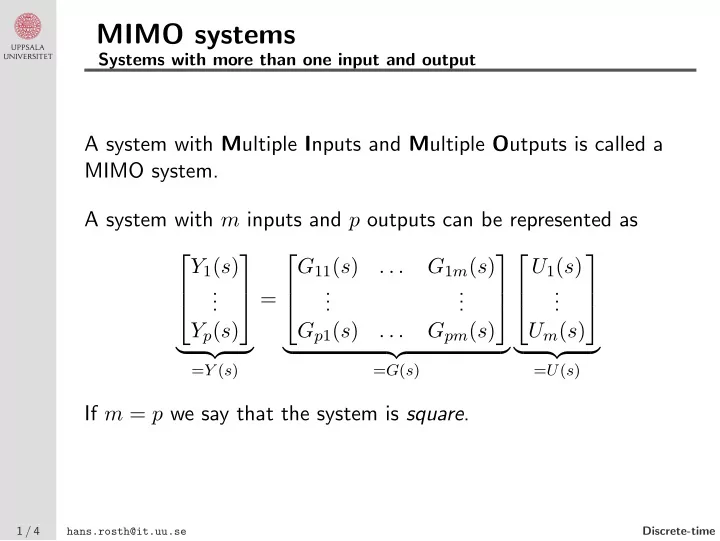
A system with Multiple Inputs and Multiple Outputs is called a MIMO system. A system with m inputs and p outputs can be represented as Y1(s) . . . Yp(s)
- =Y (s)
= G11(s) . . . G1m(s) . . . . . . Gp1(s) . . . Gpm(s)
- =G(s)
U1(s) . . . Um(s)
- =U(s)
If m = p we say that the system is square.
1 / 4 hans.rosth@it.uu.se Discrete-time