
SLIDE 1
Bayes Nets: Learning Parameters and Structure
Machine Learning 10-701 Anna Goldenberg
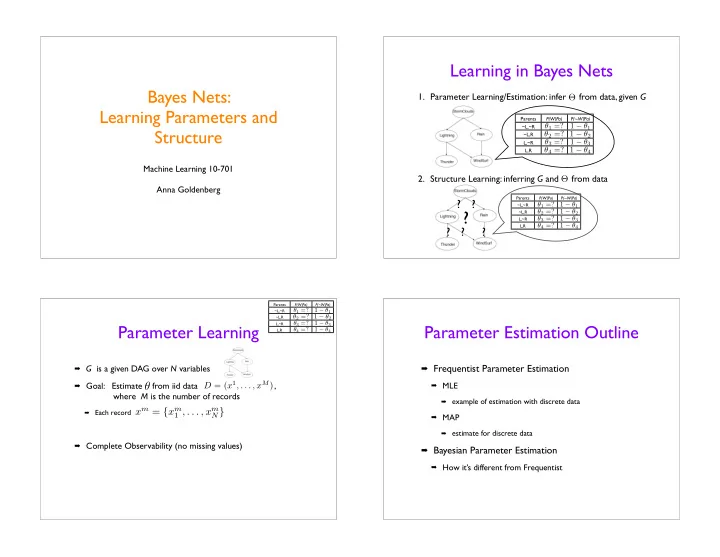
- 1. Parameter Learning/Estimation: infer from data, given G
- 2. Structure Learning: inferring G and from data
Learning in Bayes Nets
Θ
Parents P(W|Pa) P(~W|Pa) ~L,~R
θ1 =? 1 − θ1
~L,R
θ2 =? 1 − θ2
L,~R
θ3 =? 1 − θ3
L,R
θ4 =? 1 − θ4
Θ
? ? ? ? ?
?
Parents P(W|Pa) P(~W|Pa) ~L,~R
θ1 =? 1 − θ1
~L,R
θ2 =? 1 − θ2
L,~R
θ3 =? 1 − θ3
L,R
θ4 =? 1 − θ4
Parameter Learning
G is a given DAG over N variables Goal: Estimate from iid data ,
where M is the number of records
Each record
Complete Observability (no missing values)
θ
D = (x1, . . . , xM)
xm = {xm
1 , . . . , xm N}
Parents P(W|Pa) P(~W|Pa) ~L,~R
θ1 =? 1 − θ1
~L,R
θ2 =? 1 − θ2
L,~R
θ3 =? 1 − θ3
L,R
θ4 =? 1 − θ4
Parameter Estimation Outline
Frequentist Parameter Estimation
MLE
example of estimation with discrete data
MAP
estimate for discrete data
Bayesian Parameter Estimation
How it’s different from Frequentist