SLIDE 1 Lagrangian Observations in the Atmosphere
Balloons Horizontal position, pressure, temperature
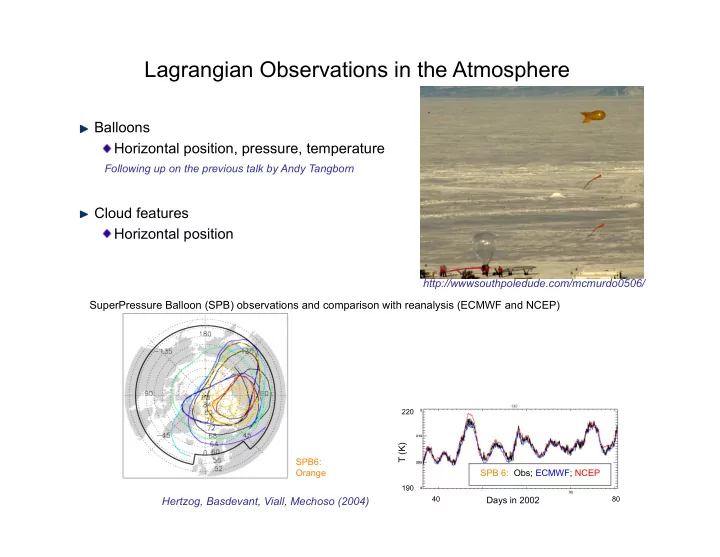
Hertzog, Basdevant, Viall, Mechoso (2004) http://wwwsouthpoledude.com/mcmurdo0506/
T (K) Days in 2002
40 80 220 190
SPB 6: Obs; ECMWF; NCEP
SuperPressure Balloon (SPB) observations and comparison with reanalysis (ECMWF and NCEP)
SPB6: Orange
Cloud features Horizontal position
Following up on the previous talk by Andy Tangborn
SLIDE 2
Lagrangian Data Assimilation (LaDA): Method and Mathematical Challenges
Kayo Ide, UCLA Guillaume Vernieres & Chris Jones, UNC-CH Hayder Salman, Cambridge Unversity
http://www.drifters.doe.gov/design.html Data available from http://www.aoml.noaa.gov/phod/dac/dacdata.html
SLIDE 3 Two Mathematical Issues in LaDA
- 1. High nonlinear drifter dynamics Handing of chaotic data
- 2. Limited number of observations Deployment strategy
SLIDE 4 Basic Elements of Lagrangian Data Assimilation System
xF tk
( ) =
uijl tk
( )
vijl tk
( )
hijl tk
( )
⎛ ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ NF 10
5-7
yD,j tk
( ) =
rD,j
(x) tk
( )
rD,j
(y ) tk
( )
rD,j
(p) tk
( )
⎡ ⎣ ⎤ ⎦ ⎛ ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ LD = 2 [or 3] per drifter
Application to Gulf of Mexico: Next Presentation by Guillaume Vernieres
SLIDE 5 x
a =
xF
a
xD
a
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ = xF
f
xD
f
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ + P
FD f
P
DD f
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ P
DD f + RDD
)
−1 yD
f
( )
Lagrangian Data Assimilation (LaDA) Method
Eulerian Models xF Lagrangian Data yD Lagrangian Data Assimilation (LaDA) x ≡ xF xD ⎛ ⎝ ⎜ ⎞ ⎠ ⎟
yD
t + εD = xD t + εD
Augmented model state x Partial observation y of x Direct assimilation of yD into xF P ≡ P
FF
P
FD
P
DF
P
DD
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ H = 0 I
( ) εD N 0
RDD
)
EKF: Ide, Jones, Kuznetsov (2002); EnKF: Salman,Kuznetsov, Jones, Ide (2005)
xF tk
( )
xD tk
( )
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ = mF xF tk−1
( )
( )
mD xF tk−1
( ),xD tk−1 ( )
( )
⎛ ⎝ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟
Explicit computation of flow-dependent P is required
SLIDE 6
Proof of Concept: Application to Mid-latitude Ocean Circulation
Ocean circulation
1-layer shallow-water model Wind-driven: τ=0.05 Ns-2 Domain size: 2000km x 2000km
Perfect model scenario
Model spin-up for 12yrs Nature run with H0=500m Ensemble with (Hmean, Hstd)=(550m,50m) Drifters Released at the beginning of 13yr Observed every day with σstd=200m
SLIDE 7
Case: ν=500m2s-1, (∆T, LD )=(1day, 1)
T=0 days T=90 days Truth Without DA Ensemble Mean With LaDA Analysis
Weakly chaotic ocean dynamics by basin-scale Rossby wave Background color contour: instantaneous h
Trajectory for 90days
SLIDE 8
Case: ν=500m2s-1, (∆T, LD )=(1day, 1)
T=0 days T=90 days Truth Without DA Ensemble Mean With LaDA Analysis
SLIDE 9
Issue 1: Handling of Chaotic Data for xD
Spatially-Temporally chaotic ocean dynamics in truth: ν=400 m2s-1 Triangles in color: Drifters motion in truth Curves in purple: Material boundaries (manifolds for xD) Background contour: Instantaneous h in truth
SLIDE 10 Sudden Filter Divergence by the Hyperbolic Effect for xD
Large innovation d can occur near a hyperbolic trajectory(HT) Spread of Pf
DD brings xa D properly close to yo
Unreastically large Δxf
D can occur due to poor representation of Pf FD
Ensemble spread of xD (ΔT=20) Ensemble mean (forecast/analysis)
x
D f
x
D a
yD
D f
ΔxF
a
ΔxD
a
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ = P
FD f
P
DD f
⎛ ⎝ ⎜ ⎞ ⎠ ⎟ P
DD f + RD
)
−1d
xD(t=0) xD(t=20) xD(t=40) Hyperbolic Trajectory (HT)
SLIDE 11 Two potential sources for large d=yo – xD
t
1. Large observation error: yo – xD
t No update (outlier yo)
2. Fast dispersion in: xD
f – xD t Update at least xD & check for xF
Outline of the quality control scheme
a) Detection of hyperbolic effect (HE) in xD
f using 2 tests
1. Against Rd
2. Against (PDD
f+RD
b) Sanity check for ΔxF
a
f:
Update with QC Scheme
Quality Control Scheme to Handle Chaotic Data for xD
More sophisticated approach (Particle filter): Spiller, Budhiraja, Ide, Jones (2008)
cD
T RD
)
−1d
cD
T P DD f + RD
)
−1d
cF
a = ΔxF aT P FF f
( )
−1ΔxF a
CD
CD
CD
xF
& xD
xF
& xD
CD
No Update HE detected CF
a<βa
CF
a≥βa
xF
& xD
xD only
SLIDE 12
Issue 2: Towards Observing System Design
Observing system:
Trajectories significantly differ depending on deployment locations/times Once Lagrangian instruments are released, they go with the flow. Number of drifters and resources to deploy instruments are limited.
Data assimilation system:
Regions where Lagrangian observations effectively correct the model state are restricted around the trajectories.
Observing system design = targeting (without metric) by taking into account of
Lagrangian flow structures evolving in {xF(t)} Freely moving instruments {xD(t)} in {xF(t)}
SLIDE 13 Directed Deployment of Drifters for Targeting in xF for xD
Eddy tracking
Deploy so that drifters will stay in the eddy
Survey of largest possible area
Deploy where drifters will spread out quickly visit various parts of the flow
Balanced performance
Use combination
If no information about Lagrangian flow dynamics
Deploy uniformly
- r based on educated guesses
(and cross your fingers)
SLIDE 14
Lagrangian Flow Template by Dynamical Systems Theory
Stable and unstable manifolds from the hyperbolic trajectories (HTs) = “material boundaries” of distinct Lagrangian flow regions Dynamical systems theory: A tool analyze Lagrangian dynamics given a time sequence of (Eulerian) flow field
Eulerian Model Field {xF(t), t0-T≤t≤t0-T} Lagrangian flow template for {xD(t0)} How to obtain Lagrangian flow template? How to detect manifolds?
Dynamical Systems Theory
SLIDE 15
Lagrangian Flow Template for xD in Unsteady Flow xF
Direct Lyapunov Exponents (DLE): divergence of the nearby trajectories
Application to transport: Haller (2001, 2002) and Others. Application to DA: Salman, Ide, Jones (2007) Reconstruction of velocity field: Poje, Toner, Kirwan, Jones (2002)
DLE :
xD t0 +T ;x0 + δx0,t0
( ) ≈ xD t0 +T ;x0,t0 ( ) + δxD t0 +T ;x0,t0 ( )
maxδx0 δxD t0 +T ;x0,t0
( ) = exp σ t;x0,t0 ( )
{ } δx0
σ t;x0,t0
( )
High divergence: forward DLE (T>0) → stable manifolds backward DLE (T<0) → unstable manifolds
Unstable manifold stable manifold
Background contour: instantaneous h
High values of DLE (gray: T<0) and (red: T<0) at t0=0 with T=10days
SLIDE 16
Targeting based on Lagrangian Flow Template (Manifolds)
Local targeting: Eddy tracking ⇒Deploy inside of eddy, surrounded by the stable & unstable manifolds Global targeting: Survey of the largest possible area ⇒Deploy both side of the stable manifolds for fastest divergence along the unstable manifolds ⇒Deploy into the jet/current defined by the manifolds Mixed strategy: Balanced performance ⇒Deploy using local & global targeting
Lagrangian flow template Mixed strategy
Targeting
SLIDE 17
Observing System Design for Mid-Latitude Ocean
Local Targeting (3 eddies x 3) Global Targeting (3 HT x 3) Uniform Deployment (3 x 3) Mixed Strategy (3 eddies x 1 2 HT x 3)
Perfect model scenario
Model spin-up for 12yrs Nature run with h0=500m Ensemble with (hmean, hstd)=(550m,50m) Drifters Released at the beginning of 13yr Observed every day with σstd=200m
Test strategies using 9 drifters
SLIDE 18 Local Targeting Strategy
Truth Local targeting T=25days T=300days T=100days
Background color contour: instantaneous h
Initial error in h: Global Failure to capture new eddy generation
SLIDE 19
Global Targeting Strategy
Truth Global targeting T=25days T=300days T=100days
SLIDE 20
Mixed Strategy = Global + Local
Truth Mixed T=25days T=300days T=100days
SLIDE 21 Spatial Distribution of RMSE in h
Local Targeting T=25days T=300days T=100days Global Targeting
Failure to capture new eddy generation Effective basin-scale estimation by fast divergence
SLIDE 22
Spatial Distribution of RMSE in h
T=25days T=300days T=100days Mixed Strategy Uniform Deployment
SLIDE 23 Spatial Distribution of RMSE in KE
Failure to capture new eddy generation
Local Targeting T=25days T=300days T=100days Global Targeting
Initial KE error distribution: local
SLIDE 24
Spatial Distribution of RMSE in KE
Mixed strategy T=25days T=300days T=100days Uniform Deployment
SLIDE 25
Remarks on Deployment Strategy
Deployment strategy
It is targeting for xD(t0), using Lagrangian flow template obtained by {xF(t), t0-T≤t≤t0+T} It is naturally built on dynamical systems theory
Eulerian Model Field {xF(t), t0-T≤t≤t0-T} Directed Deployment (e.g., Mixed strategy) Lagrangian flow template xD(t0) Targeting DLE / dynamical systems theory
SLIDE 26 Summary
Two mathematical issues in LaDA
- 1. Chaotic nature of Lagrangian dynamics
- 2. Deployment strategy that requires Lagrangian (non-instantaenous)
information of the flow
REAL challenges in deployment strategy for LaDA
Drifters are to be released in the real ocean {xt
F(t)}
while Lagrangian flow template (DLE) is obtained by {xm
F(t), t0-T≤t≤t0}.
DLE computation requires {xm
F(t), t0-T≤t≤t0+T} in the past and future
Deployment strategy is doubly penalized by
Predictability limit & uncertainties of Lagrangian dynamics {xD(t)} Predictability limit & uncertainties of flow field {xF(t)}
Deployment strategy can benefit from chaotic nature of Lagrangian dynamics
Lagrangian time scale of {xD(t)} in {xF(t)} is much shorter than Eulerian (evolution) time scale of {xF(t)}