
SLIDE 1
Kinematic Redundancy
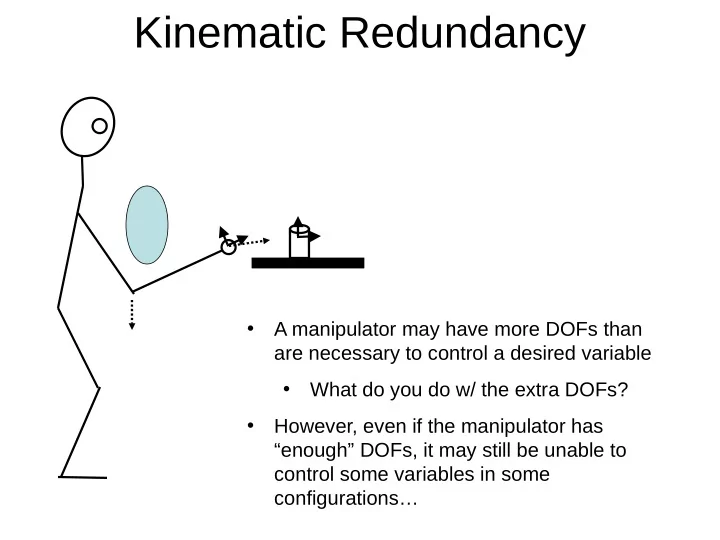
- A manipulator may have more DOFs than
are necessary to control a desired variable
- What do you do w/ the extra DOFs?
- However, even if the manipulator has
“enough” DOFs, it may still be unable to control some variables in some configurations…