
SLIDE 1
Perceptual and Sensory Augmented Computing
Visual Search Tutorial
Introduction to Visual Search and Recognition
Perceptual and Sensory Augmented Computing
Visual Search Tutorial
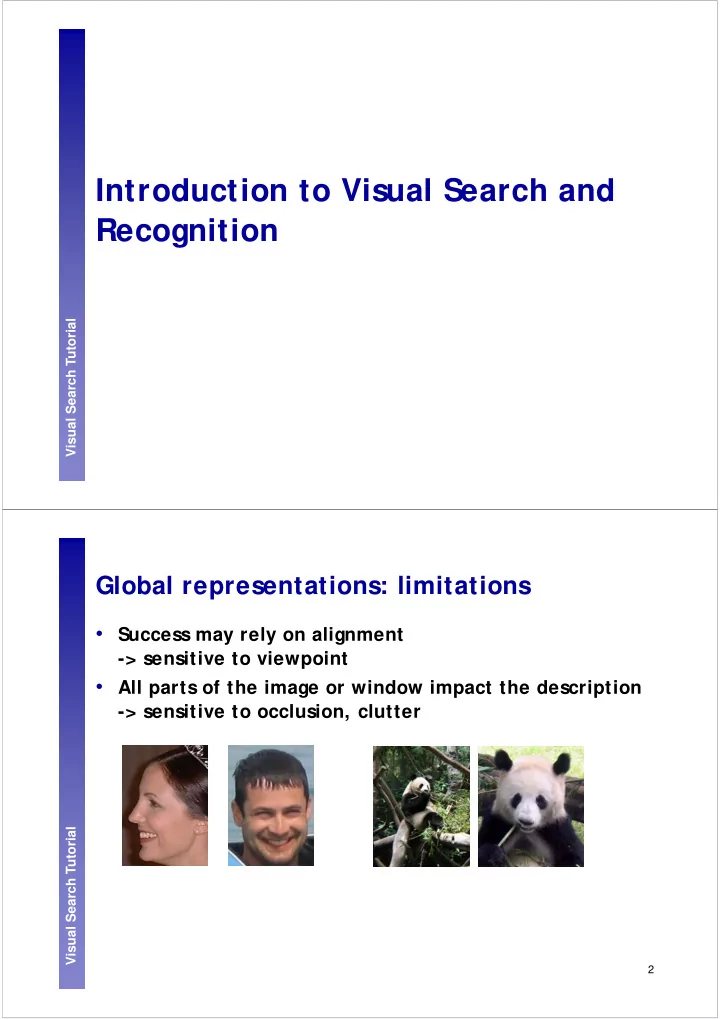
Global representations: limitations
- Success may rely on alignment
- > sensitive to viewpoint
- All parts of the image or window impact the description
- > sensitive to occlusion, clutter
2