
SLIDE 1
3
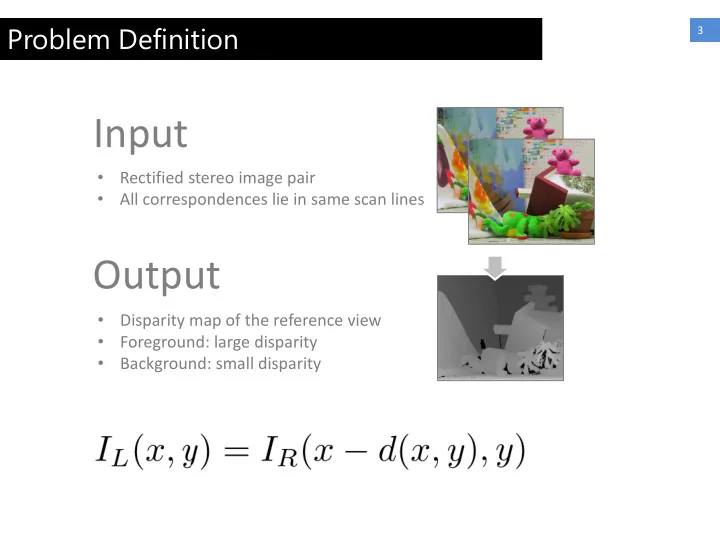
Input
- Rectified stereo image pair
- All correspondences lie in same scan lines
Output
- Disparity map of the reference view
- Foreground: large disparity
- Background: small disparity