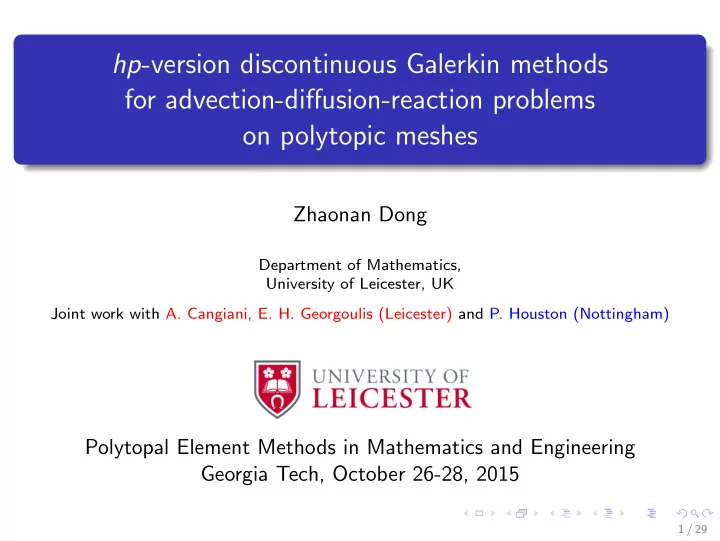
SLIDE 35 Numerical example – parabolic problem
10
1
10
2
10
3
10
−10
10
−9
10
−8
10
−7
10
−6
10
−5
10
−4
10
−3
10
−2
10
−1
10
Dof1/3 || u−uh||L2((0,T),H1(Ω)) L2((0,T),H1(Ω)) norm error under h refinement
DG rect P2 slope 2.0118 DG rect P5 slope 5.143 DG rect P6 slope 6.2208 DG poly P2 slope 1.9935 DG poly P5 slope 5.0011 DG poly P6 slope 6.02102 DG rect PQ1 slope 1.0077 DG rect PQ4 slope 4.0146 DG rect Q1 slope 1.0059 DG rect Q4 slope 4.0006 FEM rect Q1 slope 1.0363 FEM rect Q4 slope 4.024
10
1
10
2
10
3
10
−12
10
−10
10
−8
10
−6
10
−4
10
−2
10
Dof1/3 || u−uh||L∞((0,T),L2(Ω)) L∞((0,T),L2(Ω)) norm error under h refinement
DG rect P2 slope 2.8031 DG rect P5 slope 5.6289 DG rect P6 slope 6.6693 DG poly P2 slope 2.8084 DG poly P5 slope 5.5871 DG rect P6 slope 6.6630 DG rect PQ1 slope 1.9968 DG rect PQ4 slope 4.9904 DG rect Q1 slope 1.9864 DG rect Q4 slope 4.9903 FEM rect Q1 slope 2.021 FEM rect Q4 slope 5.0084
Figure: space-time h–refinement.
25 / 29