
SLIDE 1
11/27/2011 1
Heap Cloning: Enabling Dynamic Symbolic Execution of Java Programs
Saswat Anand Mary Jean Harrold
Supported by NSF (CCF-0725202, CCF-0541048) and IBM (Software Quality Innovation Award)
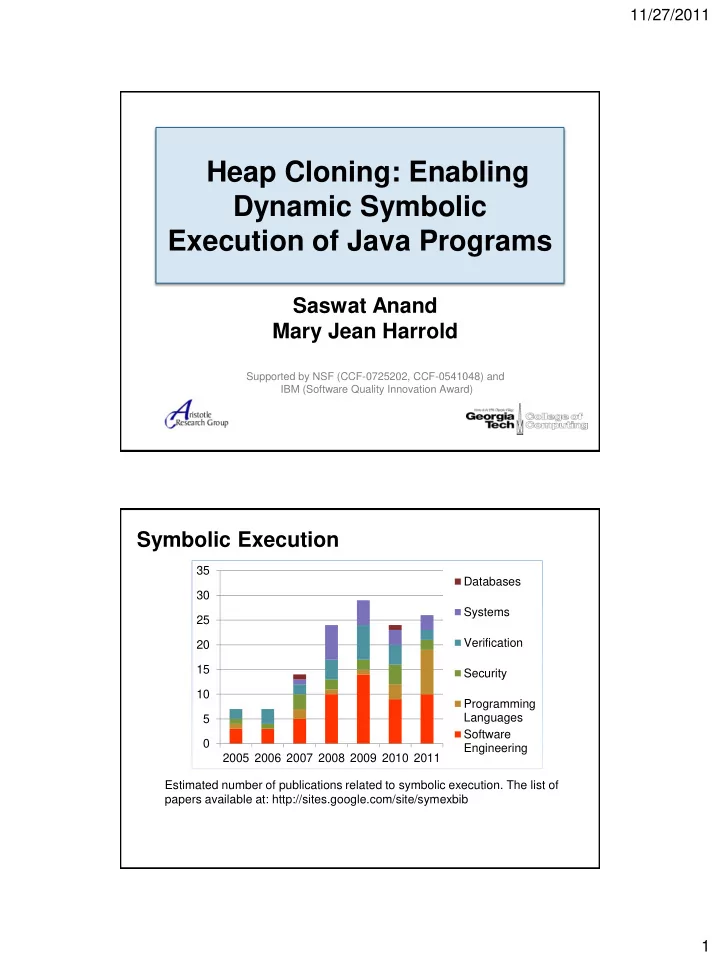
Symbolic Execution
5 10 15 20 25 30 35 2005 2006 2007 2008 2009 2010 2011 Databases Systems Verification Security Programming Languages Software Engineering Estimated number of publications related to symbolic execution. The list of papers available at: http://sites.google.com/site/symexbib