
SLIDE 1
1
IIP 1
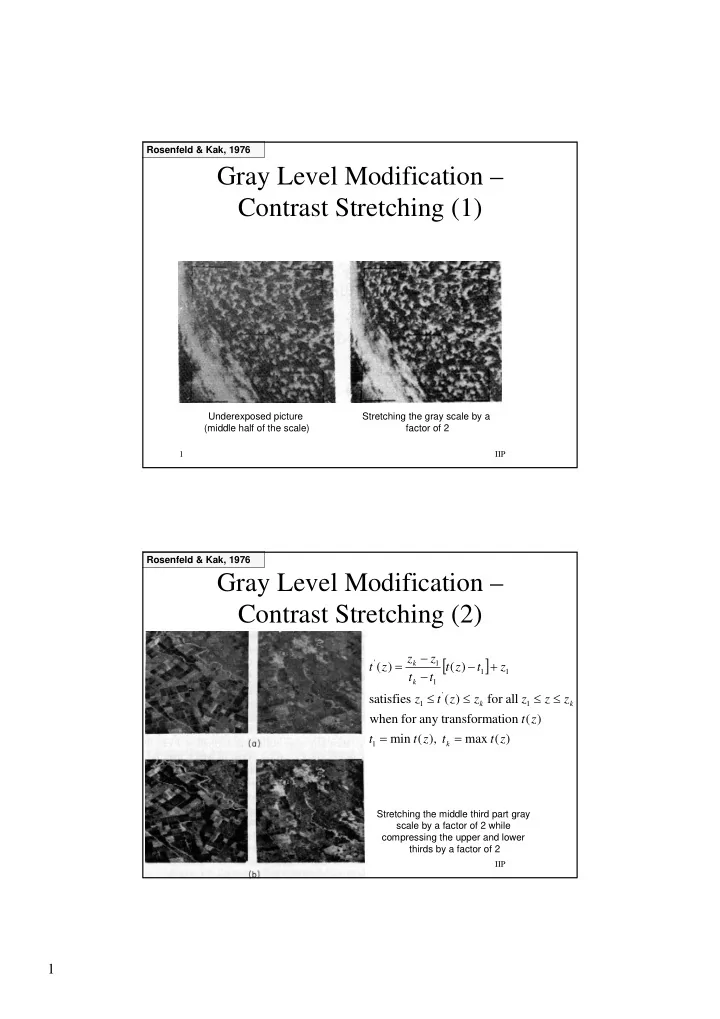
Gray Level Modification – Contrast Stretching (1)
Stretching the gray scale by a factor of 2 Underexposed picture (middle half of the scale) Rosenfeld & Kak, 1976
IIP 2
Gray Level Modification – Contrast Stretching (2)
Rosenfeld & Kak, 1976 Stretching the middle third part gray scale by a factor of 2 while compressing the upper and lower thirds by a factor of 2
[ ]
) ( max ), ( min ) (
- rmation
any transf for when all for ) ( satisfies ) ( ) (
1 1 ' 1 1 1 1 1 '
z t t z t t z t z z z z z t z z t z t t t z z z t
k k k k k
= = ≤ ≤ ≤ ≤ + − − − =