
SLIDE 1
1
IIP 21
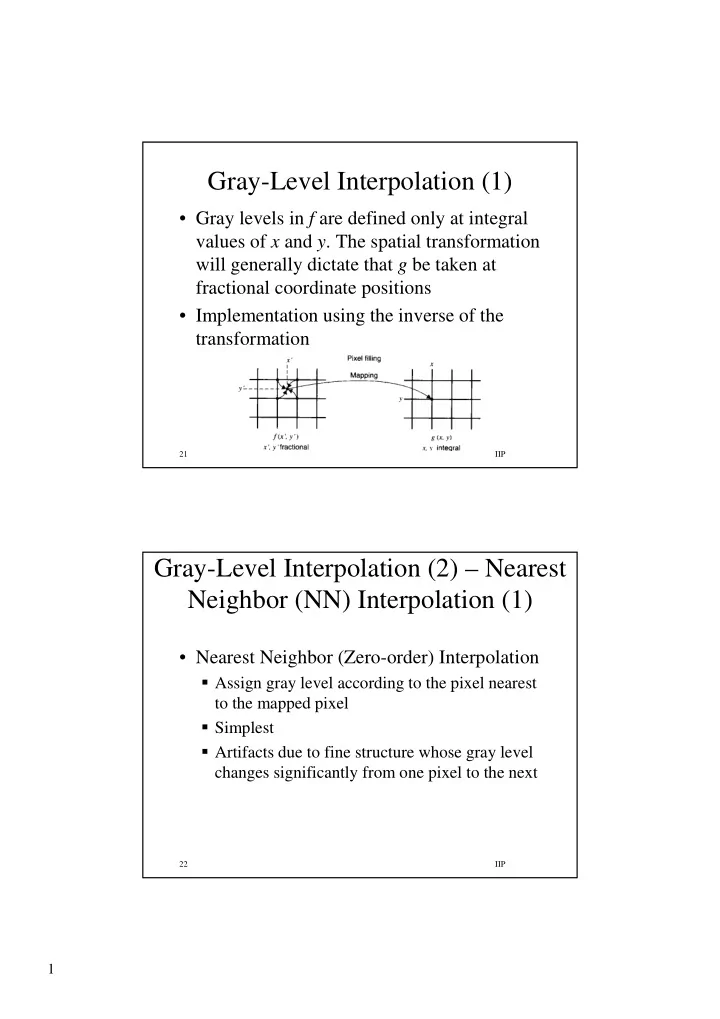
Gray-Level Interpolation (1)
- Gray levels in f are defined only at integral
values of x and y. The spatial transformation will generally dictate that g be taken at fractional coordinate positions
- Implementation using the inverse of the
transformation
IIP 22
Gray-Level Interpolation (2) – Nearest Neighbor (NN) Interpolation (1)
- Nearest Neighbor (Zero-order) Interpolation