
FIRST YEAR REPORT 1
Generalization of Factor Graphs and Belief Propagation for Quantum Information Science
Michael X. CAO
Abstract—Factor graph is a useful tool to represent probability
- systems. In this article, we propose a new factor graph model
in representing quantum systems. Belief propagation algorithm is also generalized to this new model, and is justified via the method of loop calculus. Index Terms—Factor Graph, Quantum Probabilities, Belief Propagation, Loop Calculus
- I. INTRODUCTION
F
ACTOR graph is a popular graphical model to represent factorizations [1], [2], and has been proven practically useful in describing probability systems. Famous applications include Ising model [3], LDPC codes [4] and Turbo codes. Recent studies have generalized factor graph to repre- sent quantum probabilities [5], [6]. Related research also in- clude [7], where bipartite factor graph is proposed to represent quantum systems (i.e., quantum measures). In this paper, we propose a new factor graph model, namely quantum (normal) factor graph (QFG or QNFG), to represent quantum systems. The concerned global function is in form
- f
g (x, x′; y) =
- a∈F
fa (x∂a, x′
∂a; yδa)
(1) where for any fixed yδa, induced function f yδa
a
(x∂a, x′
∂a)
is Hermitian positive semi-definite (PSD), i.e., the matrix [f yδa
a
]x∂a,x′
∂a is PSD. Whereas, in [5], it is required for each
fa to be decomposable, i.e., fa (x∂a, x′
∂a; yδa) = ˜
fa (x∂a; yδa) ˜ fa (x′
∂a; yδa)
(2) In this sense, our model is more general. The partition sum problem, which is ubiquitous in many problems modeled by classical factor graphs, is also consid- ered for QFGs. In particular, we consider a generalized version
- f belief propagation (BP) algorithm for QFGs. The major
approaches applied here include loop calculus [8], [9] and cluster variation methods [10]. The rest of this article is organized as follows. Section II gives a tour from the classical factor graphs to the quantum factor graphs as our proposal. Section III provides several examples in elementary quantum mechanics described by
- QNFGs. Section IV introduces the sum-product algorithm and
the belief propagation for QFGs. The derivation of the loop calculus for belief propagation for QFGs is also contained in this section. Such derivation is based on Mori’s idea [7], [8]. Section V shows our partial result by applying cluster variation method to QFG. Section VI concludes the paper. In this article, for finite alphabet X, we denote Lh (X) the inner product space of Hermitian linear operators acting on X, p uA uB bB bA qB z x z′ y
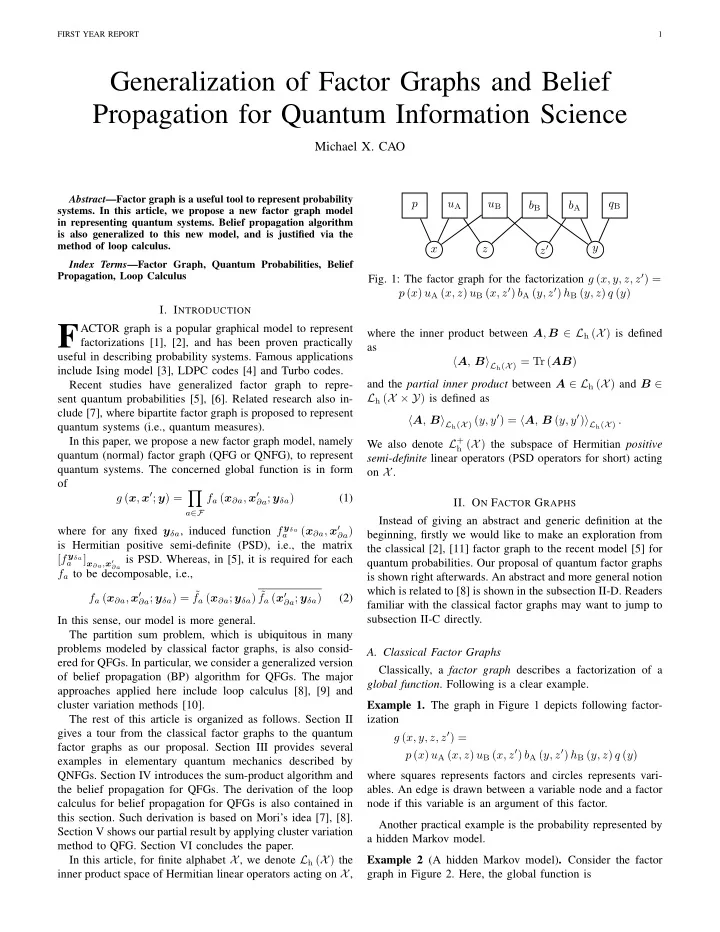
- Fig. 1: The factor graph for the factorization g (x, y, z, z′) =
p (x) uA (x, z) uB (x, z′) bA (y, z′) hB (y, z) q (y) where the inner product between A, B ∈ Lh (X) is defined as A, BLh(X) = Tr (AB) and the partial inner product between A ∈ Lh (X) and B ∈ Lh (X × Y) is defined as A, BLh(X) (y, y′) = A, B (y, y′)Lh(X) . We also denote L+
h (X) the subspace of Hermitian positive
semi-definite linear operators (PSD operators for short) acting
- n X.
- II. ON FACTOR GRAPHS
Instead of giving an abstract and generic definition at the beginning, firstly we would like to make an exploration from the classical [2], [11] factor graph to the recent model [5] for quantum probabilities. Our proposal of quantum factor graphs is shown right afterwards. An abstract and more general notion which is related to [8] is shown in the subsection II-D. Readers familiar with the classical factor graphs may want to jump to subsection II-C directly.
- A. Classical Factor Graphs
Classically, a factor graph describes a factorization of a global function. Following is a clear example. Example 1. The graph in Figure 1 depicts following factor- ization g (x, y, z, z′) = p (x) uA (x, z) uB (x, z′) bA (y, z′) hB (y, z) q (y) where squares represents factors and circles represents vari-
- ables. An edge is drawn between a variable node and a factor
node if this variable is an argument of this factor. Another practical example is the probability represented by a hidden Markov model. Example 2 (A hidden Markov model). Consider the factor graph in Figure 2. Here, the global function is