
SLIDE 1
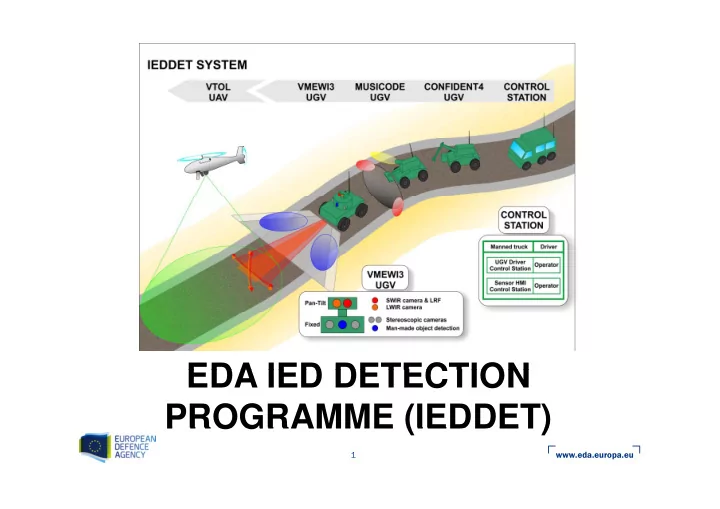
EDA IED DETECTION EDA IED DETECTION PROGRAMME (IEDDET)
www.eda.europa.eu 1
EDA IED DETECTION EDA IED DETECTION PROGRAMME (IEDDET) PROGRAMME - - PowerPoint PPT Presentation
EDA IED DETECTION EDA IED DETECTION PROGRAMME (IEDDET) PROGRAMME (IEDDET) www.eda.europa.eu 1 Ag Agenda 1. Context 2. Overall goal 3. R&T Goals 4. CST 5. Structure 6. Projects j 7. T&E 8 8. Current status Current
www.eda.europa.eu 1
1. Context 2. Overall goal 3. R&T Goals 4. CST 5. Structure 6. Projects j 7. T&E 8 Current status 8. Current status
www.eda.europa.eu 2
www.eda.europa.eu 3
www.eda.europa.eu 4
www.eda.europa.eu 5
Detection on move with at least 20 30 km/h
Low operator workload
deployment of the sensor-suite or forward looking sensors from ground vehicles vehicles
www.eda.europa.eu 6
g y
Remote platforms controlled from within jamming bubble
up-tempo of the convoy
www.eda.europa.eu 7
Ability to provide detailed information
ground vehicle with combined sensing and interrogation capability
www.eda.europa.eu 8
RC Operation split in Phases
Automatic (detection) processing
www.eda.europa.eu 9
IED IED De Detection Pr ection Programme (IEDDET)
Managing Committ Managing Committee ee
Joi Joint req requirements irements
Joint
T& T&E
Joint
demo demo
Syst System em int integration egration ,,,,,, ,,,,,,
CONFIDENT CONFIDENT Confirmation and Id tifi ti MUSICODE MUSICODE UGV Stand-off d t ti VMEWI3 VMEWI3 UGV/Manned Vehicle E l W i Identification demonstrator detection demonstrator Early Warning demonstrator
www.eda.europa.eu 10
Vehicle Mounted Early Warning of Indirect Indicators of IEDs < UGV platform> (VMEWI3)
Aim: Aim: test and demonstrate automatic early
< UGV platform> (VMEWI3)
y warning support in Route Clearance Operation. pMS: NL pMS: NL lead lead, AT, BE, PL Object Objectiv ives: es: Develop technology demonstrator TRL 6-7 with the following main features:
workload on a representative vehicle for Route Clearance operations.
disturbed soil, changes terrain, artificial
www.eda.europa.eu 11
Vehicle Mounted Early Warning of Indirect Indicators of IEDs < UGV platform> (VMEWI3)
Aim: Aim: test and demonstrate automatic early
< UGV platform> (VMEWI3)
y warning support in Route Clearance Operation. pMS: pMS: NL lead, AT, BE, PL Object Objectiv ives: es: Develop technology demonstrator TRL 6-7 with the following main features:
workload on a representative vehicle for Route Clearance operations.
disturbed soil, changes terrain, artificial
www.eda.europa.eu 12
UGV Stand-off detection platform for IED components detection (MUSICODE)
Aim: Aim: to demonstrate a multi sensor UGV for detection of IED components. p pMS: pMS: NO lead, AT, BE, NL, PL Object Objectiv ives: es: Object Objectiv ives: es:
sensor solution with advanced data processing can improve the
Image: Raytheon UK
data processing can improve the performance with regard to
sensors beyond present solutions on the market
systems
distance to UGV not sensor package
www.eda.europa.eu 13
distance to UGV, not sensor package
Confirmation, Identification and Airborne Early Warning of (CBRN) IEDs (CONFIDENT)
Aim: Aim: Develop close-in and stand-off (about 10m) confirmation and
( )
(about 10m) confirmation and identification of IEDs including the detection and identification of explosives and chemical or explosives and chemical or radiological agents in order to contribute to defeat CBRNe improvised devices. p pMS pMS: AT lead, BE, NO, PL Object Objectiv ives: es: Object Objectiv ives: es: The demonstrator should be able to access the IED safely in order to take samples and/or drain the agent. The project will contribute to defeat a CBRNe/improvised
gy g
www.eda.europa.eu 14
Vehicle Mount hicle Mounted Early W d Early Warni arning of g of Indi Indirect rect Indi Indica cators rs of
IEDs < UG < UGV platf V platform> rm> (VMEWI3) (VMEWI3) The objectives of the Project is to focus on the detection of indirect j j indicators with forward looking camera systems. The technology demonstrator will be based on remotely operated UGV platform with multi-camera head. The UGV platform will be controlled from first d hi l manned vehicle. UG UGV stand-of V stand-off f multi-sensor multi-sensor platf latform
for IED com r IED component
detecti ction p p p p (MUSICODE) (MUSICODE) The project will develop a new multi-sensor deployment and processing to present the detection and relevant information to the operator. The remote operation from within the jamming bubble will be studied but remote operation from within the jamming bubble will be studied, but will not be a critical design requirement for MUSICODE project. Con Confi firmation
Identifi fication cation and Airborn and Airborne Earl Early Wa Warning of
CBRN) IEDs IEDs , y , y g ( ) (CONFI (CONFIDENT) DENT) The objectives of the Project are to focus on the confirmation of IEDs and identification of relevant components including electronic parts, l i d CBRN l d i t th l f th g t
www.eda.europa.eu 15
explosives and CBRN payloads prior to the release of the agents. Potential leakages are part of the scenario. The demonstrators will be based on remotely operated platforms (robot and UAV).
www.eda.europa.eu 16
technology demonstrators could be on same UGV platform),
earlier and/or reported in off-line “detection-map”.
i i ff li “d i ” warnings in off-line “detection-map”.
Halted to quickly inspect in further detail Hotspots/suspects areas reported as detections
in off-line “detection-map”,
i l di g l IED d CBRN
d i d i b i
www.eda.europa.eu 17
including complex IEDs and CBRNe devices and in an urban scenario.
capabilities in support of defining Future Route Clearance beyond 2020. y
Mobile
www.eda.europa.eu 18