
SLIDE 1
Chapter 5 Frequency Domain Analysis
- f Systems
Chapter 5 Frequency Domain Analysis
- f Systems
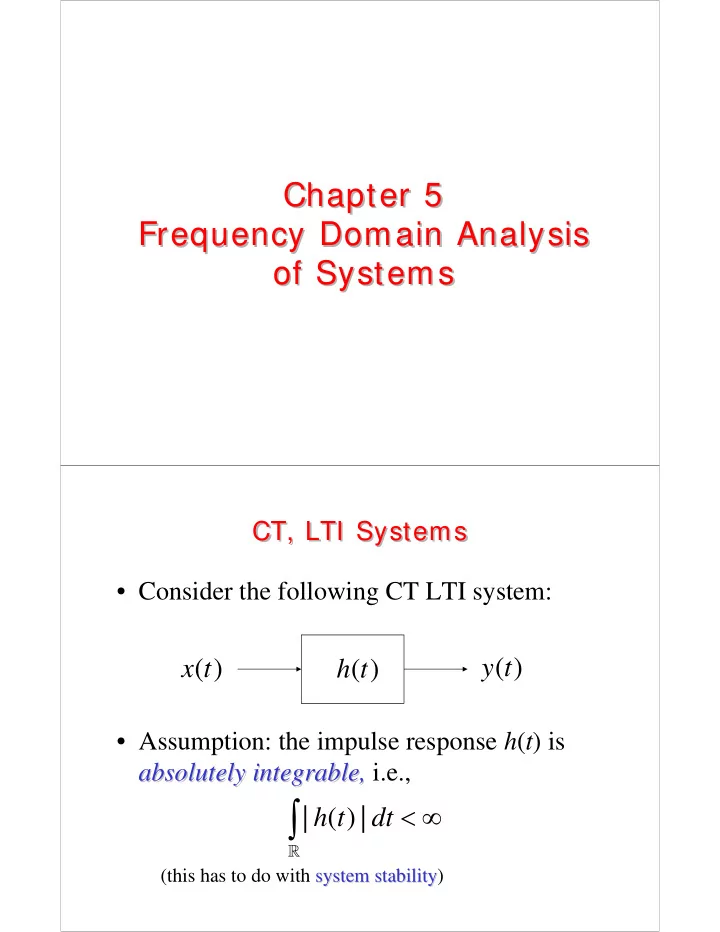
- Consider the following CT LTI system:
- Assumption: the impulse response h(t) is
absolutely absolutely integrable integrable, , i.e., CT, LTI Systems CT, LTI Systems
( ) y t ( ) x t ( ) h t | ( ) | h t dt < ∞
∫
- (this has to do with system stability
system stability)