
SLIDE 1
Design Principles for Precision Mechanisms
- 4. Hysteresis and Microslip
1 Hysteresis and Microslip
F L f
Friction W
c
v
s W 2
( )
c arctan
F f c W sv 2 =
1 2 3 4 5 6
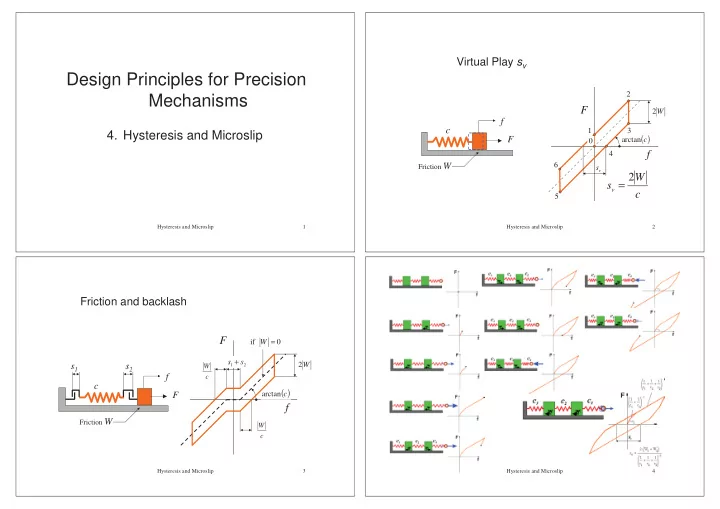
Virtual Play sv
2 Hysteresis and Microslip
Friction W
F L f c s1 s2
Friction and backlash
2 1
s s + W 2
( )
c arctan
F f
c W
if = W
c W
3 Hysteresis and Microslip 4 Hysteresis and Microslip