
SLIDE 1
1
CSE 473: Artificial Intelligence Hidden Markov Models
Daniel Weld University of Washington
[Many of these slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.]
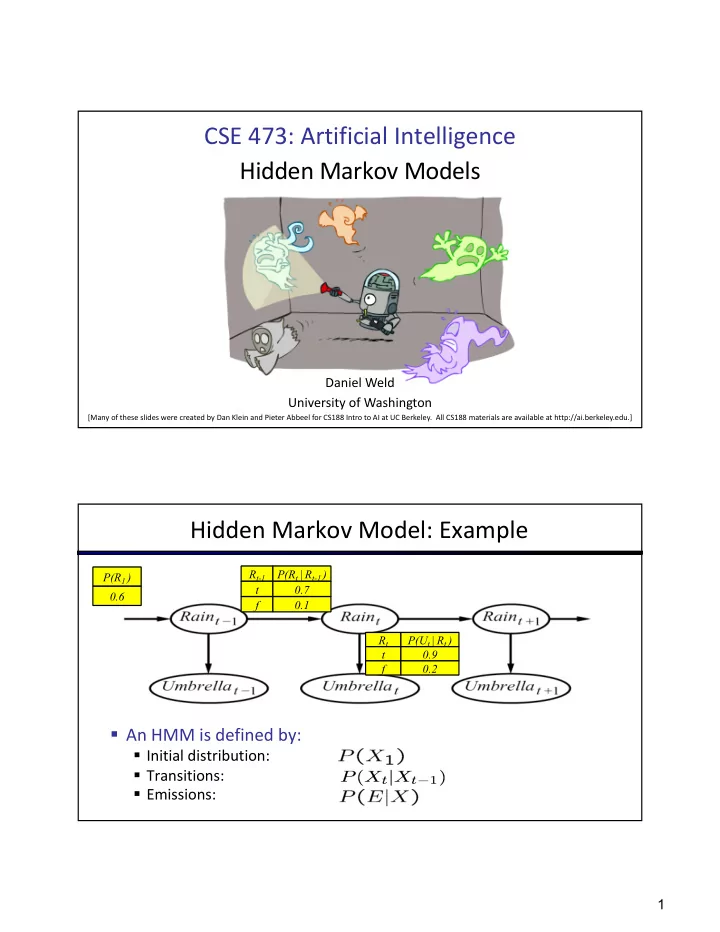
Hidden Markov Model: Example
§ An HMM is defined by:
§ Initial distribution: § Transitions: § Emissions:
P(R1 ) 0.6 Rt-1 t f P(Rt | Rt-1 ) 0.7 0.1 Rt t f P(Ut | Rt ) 0.9 0.2