
SLIDE 1
Create your own ground truth generator!
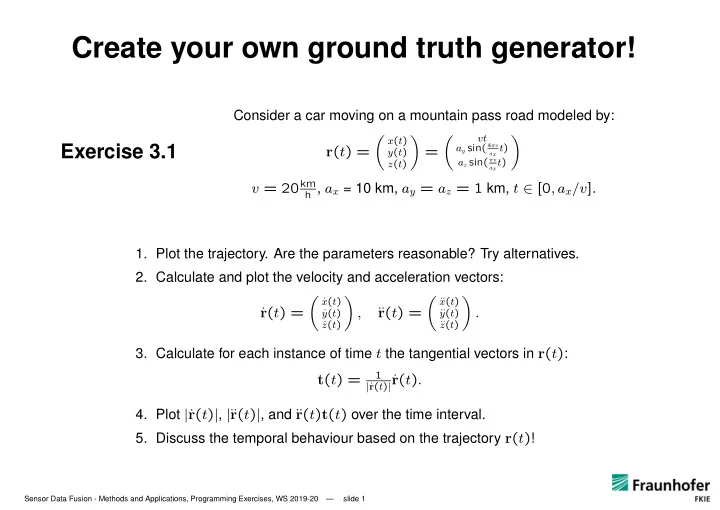
Exercise 3.1
Consider a car moving on a mountain pass road modeled by:
r(t) =
- x(t)
y(t) z(t)
- =
- vt
ay sin( 4πv
ax t)
az sin( πv
axt)
- v = 20km
h , ax = 10 km, ay = az = 1 km, t ∈ [0, ax/v].
- 1. Plot the trajectory. Are the parameters reasonable? Try alternatives.
- 2. Calculate and plot the velocity and acceleration vectors:
˙
r(t) =
- ˙
x(t) ˙ y(t) ˙ z(t)
- ,
¨
r(t) =
- ¨
x(t) ¨ y(t) ¨ z(t)
- .
- 3. Calculate for each instance of time t the tangential vectors in r(t):
t(t) =
1 |˙ r(t)|˙
r(t).
- 4. Plot |˙
r(t)|, |¨ r(t)|, and ¨ r(t)t(t) over the time interval.
- 5. Discuss the temporal behaviour based on the trajectory r(t)!
Sensor Data Fusion - Methods and Applications, Programming Exercises, WS 2019-20 — slide 1