
SLIDE 1
1
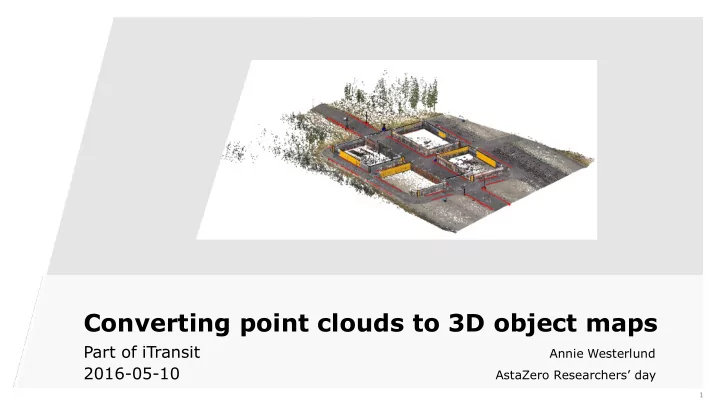
Converting point clouds to 3D object maps
Part of iTransit
Annie Westerlund
2016-05-10
AstaZero Researchers’ day
Converting point clouds to 3D object maps Part of iTransit Annie - - PowerPoint PPT Presentation
Converting point clouds to 3D object maps Part of iTransit Annie Westerlund 2016-05-10 AstaZero Researchers day 1 Agenda Short background Overview of algorithm Description: Point cloud to 3D object map Final words 2
1
Annie Westerlund
AstaZero Researchers’ day
2
3
4
5
6
XYZRGBI point cloud Input Statistical classification Cylinder detector Road refiner Wall detector Lane marking detector Object map
7
8
9
10
11
12
13
14
15